

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-
ABB机器人运行服务例行程序的操作前提
关键词:ABB,机器人,运行,服务,例行,程序,操作,前提,服务,例服务例行程序 服务例行程序执行一系列常用服务。 机器人培训哪些服务例行程序可供使用取决于您系统设置及可用选项。 更多详情,请参阅工厂或车间的说明文档。 操作前提 服务例行程序只能以手动模式启动。 程序必须停止,并且必须有程序指针。 在同步模式下无 ... 阅读更多>>
2017-04-14 -
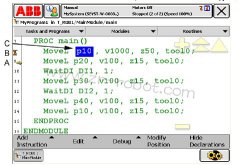
ABB机器人何通过动作指令执行步退的示例步骤
关键词:ABB,机器人,何通过,通过,动作,指令,执行,步退,示例,步退限制示例 下图解释了如何通过动作指令执行步退。机器人驱动器程序指针和动作指针可以帮助您跟踪RAPID的执行位置和ABB机器人的位置。 MoveL、MoveJ 和 MoveC 是 RAPID 中的移动指令,详情请参阅 Technicalreference manual - RAPID Instructions, Functio ... 阅读更多>>
2017-04-16 -
ABB机器人如何要执行步退有什么限制?
关键词:ABB,机器人,如何,执行,步退,什么,限制,步退,行的,限步退执行的限制 步退执行有以下限制: 1、当通过 MoveC 指令执行步退时,机器人维修程序执行不会在圆周点停止。 2、 步退时无法退出IF、FOR、WHILE 和 TEST 语句。 3、 到达某一例行程序的开头时将无法以步退方式退出该例行程序。 4、 有些影响动作的指令不 ... 阅读更多>>
2017-04-14 -

-
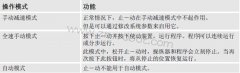
ABB机器人如何选择单步执行模式?
关键词:ABB,机器人,如何,选择,单步,执行,模式,概述,有的,操概述 在所有的操作模式中示教器维修,程序都可以步进或步退执行。 选择单步模式 此部分详细介绍了如何选择单步执行模式。单步模式分为三种:步进、步过和动作单步。 操作 1. 使用 快速设置 菜单选择单步执行模式。 ... 阅读更多>>
2017-04-14 -

专业维修3HAB8101-6-06C驱动单元
关键词:专业维修,3HAB8101-6-06C,驱动,单元,ABB,ABB机器人3HAB8101-6-06C驱动单元维修驱动器是能使机器人发出动作的动力机构。其在机器人工作运行中起着相当重要的作用,ABB机器人3HAB8101-6-06C驱动模块中安装了轴计算机(250MHz Motorola PowerPC)和驱动模块卡,轴计算机最多可对9个伺服轴进行位置和速 ... 阅读更多>>
2017-04-18 -

专业维修XRC机器人JZNC-XIUO1外部轴电机
关键词:专业维修,XRC,机器人,JZNC-XIUO1,外部,电机,维修安川机器人JZNC-XIU05伺服电机、销售安川伺服电机咨询广州子锐机器人技术有限公司。 提供安川机器人设备维修: ERC示教器维修、MRC示教器维修、XRC教导盒维修、NX100机器人触摸屏维修、DX100示教器维修;维修MOTOMAN机器人基板、安川莫托曼机器人I/F单元 ... 阅读更多>>
2017-04-24 -

专业维修JZNC-XIU05伺服电机
关键词:专业维修,JZNC-XIU05,伺服,电机,维修,安川,机器维修安川机器人JZNC-XIU05伺服电机、销售安川伺服电机咨询广州子锐机器人技术有限公司。 主要服务品牌: 日本安川莫托曼(MOTOMAN)机器人、瑞典ABB机器人、德国CLOOS克鲁斯机器人、德国KUKA库卡示教盒、FANUC发那科示教器、IGM示教盒等示教器维修。 安川机 ... 阅读更多>>
2017-04-22 -
ABB机器人如何通过移动程序指针来运行特定的例行程序?
关键词:ABB,机器人,如何,通过,移动,程序,指针,运行,定的,例概述 启动程序时,从机器人驱动器程序指针处开始执行。 要从另一个例行程序开始,将程序指针移至 该例行程序处。 操作前提 要运行特定的例行程机器人驱动器序,必须加载带有该例行程序的模块,并且控制器必须在手动 停止模式。 运行特定的例行程序 此过程描 ... 阅读更多>>
2017-04-13 -
ABB机器人如何按特定指令运行程序?
关键词:ABB,机器人,如何,特定,指令,运行,程序,概述,启动,程概述 启动程序时,从程序指针处开始执行。 要从另一个指令开始,将程序指针移至光标处。 警告 在执行启动时,ABB机器人将移至程序中第一个编程的位置。 确保带有 TCP 的ABB机器人不会遇到任何障碍。 操作 1. 在 ABB 菜单中,点击程序编辑器。 2. 点击您想要 ... 阅读更多>>
2017-04-16 -
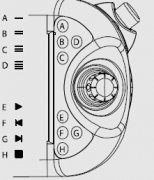
ABB机器人如何在全速手动模式下使用止-动功能?
关键词:ABB,机器,人如,何在,全速,手动,模式,使用,功能,使用使用止- 动功能 本说明详细介绍如何在全速手动模式下使用止-动功能。 操作 1. 按下FlexPendant 上的使动设备机器人驱动器 2. 通过按下并压住的方法选择执行模式: a 启动(连续执行) b 步进(步进执行) c 步退(步退执行) 3. 如果按下START (启动),机 ... 阅读更多>>
2017-04-13 -
ABB机器人在何时使用止-动功能?
关键词:ABB,机器人,何时,使用,功能,何时,使用,功能,动功,能何时使用止-动功能 止- 动功能在手动全速模式下与使动装置一道来运行或步进程序。机器人驱动器要在手动全速模式下运行程序,为安全起见,必须同时按住使动装置和 Start (启动)按钮。 这种止- 动功能在手动全速模式中步进调试程序时也适用。 在象这样(按 ... 阅读更多>>
2017-04-13
