

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-
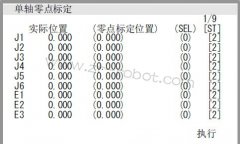
FANUC机器人的单轴零点标定怎么样设定?
关键词:FANUC,机器,人的,单轴,零点,标定,怎么样,设定,单轴单轴零点标定,是对每个轴进行的零点位置标定的方法。各轴的零点位置标定的方法位置,可以在用户设定的任意位置进行。由于后备脉冲计数的电池电压下降、更换脉冲编码器等原因而导致某一特定轴的零点位置标定的方法数据丢失时,进行单轴零点标定。 表 8.5 单 ... 阅读更多>>
2017-03-14 -

FANUC机器人如何设定零点位置标定的方法参考点?
关键词:FANUC,机器人,如何,设定,零点,位置,定的,方法,考点1、按下MENU键,选择6 SYSTEM。 2、通过画面切换选择Master/Cal。出现位置调整画面。 3、以点动(JOG)方式移动FANUC机器人,使其移动到零点位置标定的方法参考点。请在解除FANUC机器人制动器控制后进行操作。 4、选择5 SET QUICK MASTER REF(零点位置标定 ... 阅读更多>>
2017-03-17 -
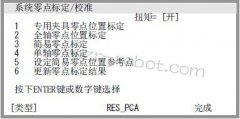
FANUC机器人零点位置标定的方法步骤
关键词:FANUC,机器人,零点,位置,定的,方法,步骤,FANUCFANUC机器人零点位置标定的方法步骤 1、按下MENU键,显示出菜单画面。 2、按下0 NEXT(下一页),选择6 SYSTEM(系统)。 3、按下F1TYPE (类型),显示出画面切换菜单。 4、选择Master/Cal。出现位置调整画面。 5、以点动(JOG)方式移动FANUC机器人,使其 ... 阅读更多>>
2017-03-17 -
FANUC机器人执行零点标定时显示位置调整菜单并解除报警的步骤
关键词:FANUC,机器人,执行,零点,定时,显示,位置,调整,菜单为进行FANUCFANUC机器人电机交换,在执行零点标定时,需要事先显示位置调整菜单并解除报警。 显示报警 Servo 062 BZAL(伺服062 BZAL)或Servo 075 Pulse not established(伺服 075 脉冲编码器位置未确定) 步骤 1 按照下面(1)~(6)的步骤显示位置调整 ... 阅读更多>>
2017-03-14 -

FANUC机器人如何进行零点标定?
关键词:FANUC,机器人,如何,进行,零点,标定,零点,标定,FA零点标定是使FANUC机器人各轴的轴角度与连接在各轴电机上的绝对值脉冲编码器的脉冲计数值对应起来的操作。具体来说,零点位置标定的方法是求取零度姿势时的脉冲计数值的操作。 一、概述 FANUC机器人的当前位置,通过各轴的脉冲编码器的脉冲计数值来确定。工 ... 阅读更多>>
2017-03-17 -

ABB机器人工件和坐标系的设置
关键词:ABB,机器人,工件,坐标系,设置,ABB,机器人,工件,设ABB机器人工件设置图示 要查看或更改可用工件,请点击工件设置按钮。 这些设置在微动控制窗口中也可用,请参阅选择工具、工件和有效载荷 第129 页 。 选择要使用的ABB机器人工件。 ABB机器人坐标系设置图示 可查看或更改坐标系功能,点击坐标系设置按钮。 这 ... 阅读更多>>
2017-03-17 -

ABB机器人动作模式的设置
关键词:ABB,机器人,动作,模式,设置,动作,模式,设置,图示,查动作模式设置图示 要查看或更改ABB机器人动作模式功能,请点击动作模式设置按钮。 这些设置在微动控制 窗口中也可用,请参阅选择动作模式 第128 页 。 选择动作模式设置: 1、轴 1-3 2、轴 4-6 3、 线性 4、重定向 ... 阅读更多>>
2017-03-15 -

ABB机器人" 快速设置" 菜单机械单元如何设置?
关键词:ABB,机器人,快速,设置,菜单,机械,单元,如何,ABB,ABB机器人机械单元按钮图示 在 快速设置返回到主屏幕。 A、机械单元菜单按钮 B、机械单元,将突出显示选中的单元。请参见选择ABB机器人机械单元进行微动控制 第126 页 。 C、有关运动模式设置(当前选定轴 1-3 运动模式)及更多设置的说明,请参阅动作模 式 ... 阅读更多>>
2017-03-12 -

ABB机器人状态栏的作用性
关键词:ABB,机器人,状态,用性,状态,图示,显示,当前,相关,信状态栏图示 状态栏 会显示当前状态的相关信息,例如ABB机器人操作模式、系统、活动机械单元。 A、操作员窗口 B、操作模式 C、系统名称(和控制器名称) D、控制器状态 E、程序状态 F、机械单元。选定单元(以及与选定单元协调的任何单元)以边框标记。活动单 ... 阅读更多>>
2017-03-15 -
ABB机器人如何利用操作员窗口?
关键词:ABB,机器人,如何,利用,操作员,窗口,ABB,机器人,操ABB机器人操作员窗口 ABB机器人操作员窗口显示来自程序的信息。 装有 Multitasking 后,所有任务信息均显示于同一ABB机器人操作员窗口。 如果有消息要求执行动作,就会显示该任务的独立窗口。点击状态栏中 ABB 标识右侧图标,即可打开ABB机器人操作员窗口。 ... 阅读更多>>
2017-03-13 -
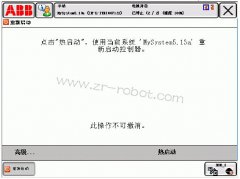
ABB机器人重新启动的好处!
关键词:ABB,机器人,重新,启动,好处,重新,启动,运行,中的,系重新启动 运行中的系统通常不需要重新启动。 点击 ABB 重新启动系统。 重新启动视图,来更改微动控制属性等。 ... 阅读更多>>
2017-03-13 -
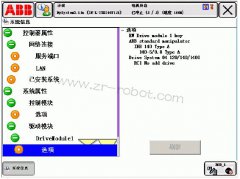
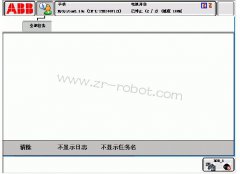
如何利用ABB机器人系统信息了解机器人运行情况?
关键词:如何,利用,ABB,机器人,系统,信息,了解,运行,情况,关关于系统信息 系统信息显示了ABB机器人控制器和已加载系统的相关信息。 您可以从下图中发现当前正在使用的 RobotWare 版本和选项、控制和ABB机器人驱动模块的当前密匙以及网络连接等信息。 系统信息视图图示 控制器属性:控制器名称。 网络连接:服务端口和 ... 阅读更多>>
2017-03-12
