
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > FANUC机器人如何设定零点位置标定的方法参考点?
FANUC机器人如何设定零点位置标定的方法参考点?
时间:2017-03-17 点击: 来源:互联网 作者:匿名
简介:1、按下MENU键,选择6 SYSTEM。 2、通过画面切换选择Master/Cal。出现位置调整画面。 3、以点动(JOG)方式移动FANUC机器人,使其移动到零点位置标定的方法参考点。请在解除FANUC机器人制动器控制后进行操作。 4、选择5 SET QUICK MASTER REF(零点位置标定……
1、按下“MENU”键,选择“6 SYSTEM”。
2、通过画面切换选择“Master/Cal”。出现位置调整画面。
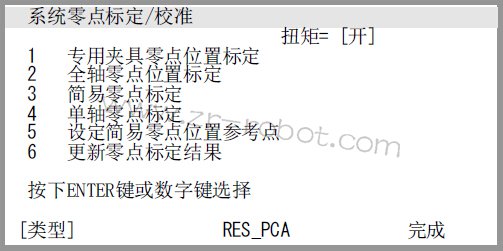
3、以点动(JOG)方式移动fanuc机器人,使其移动到零点位置标定的方法参考点。请在解除FANUC机器人制动器控制后进行操作。
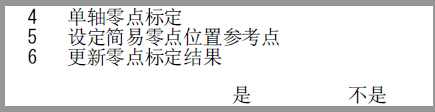
4、选择“5 SET QUICK MASTER REF”(零点位置标定的方法参考点设定),按下F4“YES”。零点位置标定的方法参考点即被存储起来。
注意
由于机械性拆解和维修FANUC机器人而导致零点位置标定的方法数据丢失时,不能执行此操作。这种情况下,为恢复零点位置标定的方法数据而执行全轴零点位置标定或专用夹具零点位置标定。
TAG:
FANUC
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
