

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-
ABB机器人关闭生产系统需要注意什么?
关键词:ABB,机器人,关闭,生产,系统,需要,注意,什么,关闭,生关闭生产系统 术语 生产系统 意味着: 1、较早投入使用的系统 2、由程序员编写和测试的应用程序 3、已经装配、连接和测试所有安全电路和设备 在关闭此类系统时,特别需要记住: 4、 在关闭任何工作单元之前务必研读任何特定的单元文档。工作ABB机器人单元安 ... 阅读更多>>
2017-03-15 -
ABB机器人如何正确关机?
关键词:ABB,机器人,如何,正确,关机,ABB,设计,系统,可降低ABB 设计的系统可降低对不正确关机的灵敏度,为此,许多功能也构建进系统中。 但是, ABB 强烈建议您依照以下指示以避免伤害人员、损害设备或者造成不必要的 麻烦,以免费时费力。 关闭系统涉及许多常用操作: 1、ABB机器人应尽可能妥善放置,以免其停止后造 ... 阅读更多>>
2017-03-19 -
ABB机器人执行执行重新启动的步骤
关键词:ABB,机器人,执行,重新,启动,步骤,概要,可使用,许多,一、概要 可使用许多不同类型的重启来重新启动控制器。有关这些重启类型及其对系统相应的影响 二、 操作步骤 此步骤假设您正在运行连接到所提控制器的 FlexPendant 步骤操作: 1. 在 ABB 菜单上,点击重新启动。显示一个消息,要求您点击 热启动。 2. 如果您 ... 阅读更多>>
2017-03-15 -
ABB机器人用引导应用程序重新启动控制器的操作步骤
关键词:ABB,机器,人用,引导,应用程序,重新,启动,控制器,操作操作步骤: 1. 执行 X- 启动进入引导应用程序。 2. 在引导应用程序中,点击Restart System。一个对话框出现,指明选定的系统。 3. 点击OK 以使用ABB机器人选定的系统重新启动,或点击Cancel 中止操作。 ... 阅读更多>>
2017-03-15 -
ABB机器人怎么样利用引导应用程序选择系统?
关键词:ABB,机器人,怎么样,利用,引导,应用程序,选择,系统,执1. 执行 X- 启动进入引导应用程序 2. 在引导应用程序中,点击Select System。一个对话框出现,显示可用的已安装系统。 3. 点击所需的系统,然后点击Select。选定的系统将显示在Selected System 方框中。 4. 点击Close。一个对话框出现,要求您重新启动以使用 ... 阅读更多>>
2017-03-14 -
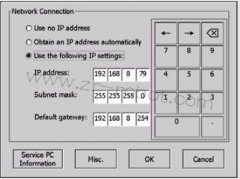
ABB机器人如何利用引导应用程序设置 IP 和网络?
关键词:ABB,机器人,如何,利用,引导,应用程序,设置,网络,ABABB机器人引导应用程序设置包含 IP 和网络设置。 操作: 1. 执行 X- 启动进入引导应用程序 2. 在引导应用程序中,点击Settings。 3. 作出相应的选择: 1、Use no IP address 2、Obtain IP address automatically 3、Use the following settings 使用数字键盘 ... 阅读更多>>
2017-03-19 -
ABB机器人使用引导应用程序目的
关键词:ABB,机器人,使用,引导,应用程序,目的,引导,应用程序,引导应用程序 ABB机器人引导应用程序主要用于未安装 RobotWare 时启动系统,但也可用作其它目的,如将系统更改至启动。您也可以使用 RobotStudio Online,请参阅 Operating manual -RobotStudio Online。 ABB机器人引导应用程序目的 ABB机器人引导应用程序在 ... 阅读更多>>
2017-03-14 -
ABB机器人如何正确启动系统?
关键词:ABB,机器人,如何,正确,启动,系统,概要,启动,ABB,概要 启动ABB机器人系统涉及大量常用步骤,这些步骤与系统启动时所处的状态无关: 1、确保没有人员或阻碍物出现在ABB机器人或任何其它运动设备的工作区内。 2、打开 Control Module 上的主开关。 3、打开 Drive Module 上的主开关。在启动多个ABB机器人系统 ... 阅读更多>>
2017-03-14 -

ABB机器人保持跟踪历史记录意义
关键词:ABB,机器人,保持,跟踪,历史,记录,意义,创建,历史,故一、创建历史故障日志! 在某些情况下,特殊安装可能会造成其它安装情况下不会出现的故障。因此,制定每种安装的图表可能会给故障排除人员提供巨大的帮助。为方便故障排除,故障情况日志具有以下优点: 1、它使故障排除人员可以查看各个故障情况下不明显的原 ... 阅读更多>>
2017-03-18 -
FANUC机器人零点位置标定的方法时发生的报警及其对策
关键词:FANUC,机器人,零点,位置,定的,方法,时发,生的,报警零点位置标定的方法时发生的报警及其对策 (1) BZAL 报警 在控制装置电源断开期间,当后备脉冲编码器的电池电压成为0V 时,会发生此报警。此外,为更换电缆等而拔下脉冲编码器的连接器的情况下,由于电池的电压会成为0V 而发生此报警。请进行脉冲复位(见8. ... 阅读更多>>
2017-03-14 -
如何确认FANUC机器人零点位置标定的方法是否正常进行?
关键词:如何,确认,FANUC,机器人,零点,位置,定的,方法,是否确认零点位置标定的方法是否正常进行 通常,在通电时自动进行位置调整。要确认零点位置标定的方法是否已经正常结束,按如下所示方法检查当前位置显示和FANUC机器人的实际位置是否一致。 (1) 使程序内的特定点再现,确认与已经示教的位置一致。 (2) 使FAN ... 阅读更多>>
2017-03-14 -
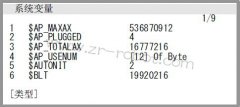
FANUC机器人零点位置标定的方法数据的输入方法
关键词:FANUC,机器人,零点,位置,定的,方法,数据,输入,FAFANUC机器人零点位置标定的方法数据的直接输入,可将FANUC机器人零点位置标定的方法数据值直接输入到系统变量中。这一操作用于FANUC机器人零点位置标定的方法数据丢失而脉冲数据仍然保持的情形。 FANUC机器人零点位置标定的方法数据的输入方法 1 、按下MENU ... 阅读更多>>
2017-03-17
