
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > FANUC机器人如何进行零点标定?
FANUC机器人如何进行零点标定?
时间:2017-03-17 点击: 来源:互联网 作者:匿名
简介:零点标定是使FANUC机器人各轴的轴角度与连接在各轴电机上的绝对值脉冲编码器的脉冲计数值对应起来的操作。具体来说,零点位置标定的方法是求取零度姿势时的脉冲计数值的操作。 一、概述 FANUC机器人的当前位置,通过各轴的脉冲编码器的脉冲计数值来确定。工……
零点标定是使fanuc机器人各轴的轴角度与连接在各轴电机上的绝对值脉冲编码器的脉冲计数值对应起来的操作。具体来说,零点位置标定的方法是求取零度姿势时的脉冲计数值的操作。
一、概述
FANUC机器人的当前位置,通过各轴的脉冲编码器的脉冲计数值来确定。工厂出货时,已经对FANUC机器人进行零点位置标定的方法,所以在日常操作中并不需要进行零点位置标定的方法。但是,下列情况下,则需要进行零点位置标定的方法。
· 更换电机
· 更换脉冲编码器
· 更换减速机
· 更换电缆
· 机构部的脉冲计数后备用电池用尽
注意
包含零点位置标定的方法数据在内的FANUC机器人的数据和脉冲编码器的数据,通过各自的后备用电池进行保存。电池用尽时将会导致数据丢失。应定期更换控制装置和机构部的电池。电池电压下降时,系统会发出报警通知用户。
二、零点标定的种类
零点标定的方法有如下 5 种。
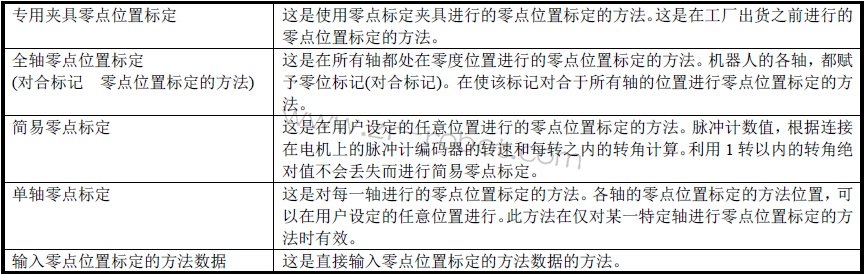
表 8.1 零点标定的种类
在进行零点位置标定的方法之后,务须进行位置调整(校准)。位置调整,是控制装置读入当前的脉冲计数值并识别当前位置的操作。这里,就全轴零点位置标定、简易零点标定、单轴零点标定以及零点位置标定的方法数据的输入进行说明。需要更加详细的零点位置标定的方法(专用夹具零点位置标定)时,请向我公司洽询。
注意
1、如果零点位置标定的方法出现错误,有可能导致FANUC机器人执行意想不到的动作,十分危险。因此,只有在系统参数$MASTER_ENB=1 或2 时,才会显示出「位置对合」界面。执行完「位置对合」后,请按下「位置对合」界面上显示出的F5“结束”。这样,自动设定$MASTER_ENB=0,「位置对合」界面不再显示。
2、建议用户在进行零点位置标定的方法之前备份当前的零点标定数据。
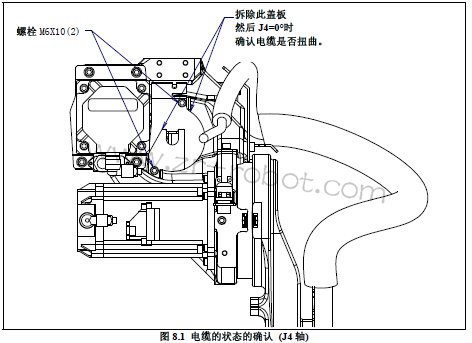
3、J4 轴,从正确的零点标定位置使轴旋转一周进行对合时,机构部内电缆会发生损伤。零点标定时大幅度移动轴而弄不清正确的旋转位置时,请拆下配线板或者盖板,确认内部电缆的状态,之后再进行正确的位置进行零点标定。有关确认步骤,请参照图8.1。
TAG:
FANUC
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
