
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

第一次启动程序或继续运行已停止的程序ABB机器人如何操作? 【图】
关键词:第一次,启动,程序,继续,运行,停止,ABB,机器人,如何,启动程序 使用此步骤第一次启动程序或继续运行已停止的程序机器人驱动器。如果您的ABB机器人系统安装了 Multitasking 选项,另请参阅使用 multitasking 程序 操作 1. 检查ABB机器人和ABB机器人单元的所有必要准备工作是否已完成,且ABB机器人工作区域是否存... 阅读更多>>
2017-04-28 -
4 轴而非 6 轴ABB机器人运行 LoadIdentify有什么不同? 【图】
关键词:而非,ABB,机器人,运行,LoadIdentify,什么,对 4 轴而非 6 轴ABB机器人运行 LoadIdentify 时,存在某些不同。 机器人驱动器在有关这些不同的描述中,假设ABB机器人类型与 IRB 260 或 IRB 660 相似。 主要的不同是: 1、使用轴 1、3 和 6。 2、因为使用轴 1,结果移动可能很巨大。 3、 未能识别全部负载... 阅读更多>>
2017-04-28 -

要运行 LoadIdentify ABB机器人如何操作? 【图】
关键词:运行,LoadIdentify,ABB,机器人,如何,操作,要启动载荷测定服务例行程序,您必须在手动模式下机器人维修具有活动程序,并且您要测定的工具和有效载荷必须已定义且在微动控制窗口内处于活动状态。微动控制 窗口。要实现最大可能的精确度,重要的是运行使用机器人驱动器操纵器上全部轴的预热程序。 操作... 阅读更多>>
2017-04-16 -
ABB机器人运行有效载荷的 LoadIdentify 服务例行程序之前的前提条件 【图】
关键词:ABB,机器人,运行,有效,载荷,LoadIdentify,有效载荷前提 运行有效载荷机器人保养的 LoadIdentify 服务例行程序之前,请确保: 1、 工具和有效载荷已正确安装。 2、 轴 6 接近水平 3、 工具载荷已知(首先运行工具 LoadIdentify)。 4、 要测定质量,需已知上臂载荷。 5、 使用移动 TCP 时,工具必须被... 阅读更多>>
2017-04-15 -
ABB机器人工具载荷前提是什么? 【图】
关键词:ABB,机器人,工具,载荷,前提,是什么,运行,工具,载荷,运行工具载荷的 LoadIdentify 服务例行程序之前机器人培训,请确保: 1、 在微动控制菜单中已选定工具 2、 工具已正确安装 3、 轴 6 接近水平 4、 要测定质量,需已知上臂载荷。 5、 轴 3、 5 和 6 不要过于接近其机器人培训相应的工作范围限制 6、 速度设置... 阅读更多>>
2017-04-15 -
ABB机器人运行服务例行程序的操作前提 【图】
关键词:ABB,机器人,运行,服务,例行,程序,操作,前提,服务,例服务例行程序 服务例行程序执行一系列常用服务。 机器人培训哪些服务例行程序可供使用取决于您系统设置及可用选项。 更多详情,请参阅工厂或车间的说明文档。 操作前提 服务例行程序只能以手动模式启动。 程序必须停止,并且必须有程序指针。 在同步模式下无... 阅读更多>>
2017-04-14 -
ABB机器人如何通过移动程序指针来运行特定的例行程序? 【图】
关键词:ABB,机器人,如何,通过,移动,程序,指针,运行,定的,例概述 启动程序时,从机器人驱动器程序指针处开始执行。 要从另一个例行程序开始,将程序指针移至 该例行程序处。 操作前提 要运行特定的例行程机器人驱动器序,必须加载带有该例行程序的模块,并且控制器必须在手动 停止模式。 运行特定的例行程序 此过程描... 阅读更多>>
2017-04-13 -
ABB机器人如何按特定指令运行程序? 【图】
关键词:ABB,机器人,如何,特定,指令,运行,程序,概述,启动,程概述 启动程序时,从程序指针处开始执行。 要从另一个指令开始,将程序指针移至光标处。 警告 在执行启动时,ABB机器人将移至程序中第一个编程的位置。 确保带有 TCP 的ABB机器人不会遇到任何障碍。 操作 1. 在 ABB 菜单中,点击程序编辑器。 2. 点击您想要... 阅读更多>>
2017-04-16 -
KUKA机器人运行过程中提示不能行选择:中断太多如何解决? 【图】
关键词:KUKA,机器人,运行,过程中,提示,能行,选择,中断,太多提示文字:不能行选择:中断太多 原因 : 在调出堆栈时不能在局部子程序进行块选择。机器人保养也就是,超过了被承认或激活的最大中断数。 查询 : 影响 : 子程序不能进行块选择。 应急措施: 减少 KRL 的中断数。... 阅读更多>>
2017-05-21 -
KUKA机器人报警在子程序中触发运行时间是不允许的的故障分析 【图】
关键词:KUKA,机器人,报警,子程序,触发,运行,时间,不允许,的提示文字 在子程序中触发运行时间是不允许的 原因 : 在子程序中一个触发被定义是可能的(在运行主程序时不起作用)机械手如果运行时间值被用来触发将是不正确的。 查询 : 在程序运行期间。 影响 : 斜坡制动,机器人保养全部激活的命令被封锁。 应急措施:... 阅读更多>>
2017-05-18 -

FANUC机器人自动运行环境条件及操作步骤 【图】
关键词:FANUC,机器人,自动,运行,环境,条件,操作步骤,外部,外部 I/O 用来控制自动执行程序和生产。 1、FANUC机器人需求信号(RSR1-RSR4)选择和开始程序。当一个程序正在执行或中断,被选择的程序处于等待状态,一旦原先的程序停止,就开始运行被选择的程序。 2、程序号码选择信号(PNS1-PNS8 和PNSTROBE)选择一个程... 阅读更多>>
2017-03-26 -
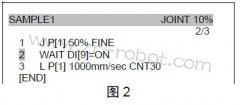
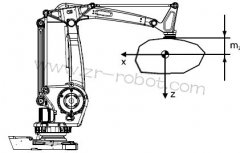
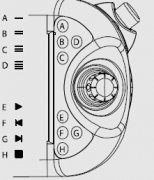
FANUC机器人运行过程中遇到Wait 语句的操作 【图】
关键词:FANUC,机器人,运行,过程中,遇到,Wait,语句,操作Wait 语句 当程序在运行中遇到不满足条件的等待信号语句时,会一直处于等待状态(图2) 此时,如果想继续往下运行,可以通过以下操作跳过等待信号语句。 当程序在运行中遇到不满足条件的等待信号语句并需要人工干预时,按FCTN 键后,选择7 RELEASE WAIT跳过... 阅读更多>>
2017-03-26
