
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
4 轴而非 6 轴ABB机器人运行 LoadIdentify有什么不同?
时间:2017-04-28 点击: 来源:互联网 作者:匿名
简介:对 4 轴而非 6 轴ABB机器人运行 LoadIdentify 时,存在某些不同。 机器人驱动器在有关这些不同的描述中,假设ABB机器人类型与 IRB 260 或 IRB 660 相似。 主要的不同是: 1、使用轴 1、3 和 6。 2、因为使用轴 1,结果移动可能很巨大。 3、 未能识别全部负载……
主要的不同是:
1、使用轴 1、3 和 6。
2、因为使用轴 1,结果移动可能很巨大。
3、 未能识别全部负载参数。
轴 1 将从当前位置移动大约 +-23 度。 因此,在识别期间负载可移动一大段距离。对于 6 轴ABB机器人,轴 3 和 6 将移动。 轴 6 的配置角度与 6 轴ABB机器人的工作方式完全相同。
因为没有 6 个轴,4 轴ABB机器人无法识别负载的全部参数。 无法识别下面的参数:
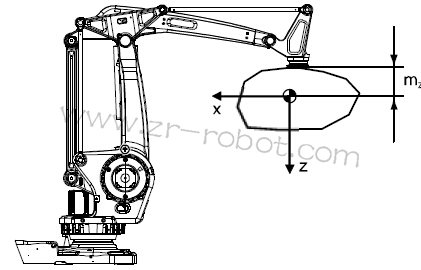
1、I x - x 轴的惯性。
2、I y - y 轴的惯性。
3、m z - 质心的 z 坐标。
但是,对于此类型的ABB机器人,机器人驱动器上面的参数对于控制性能的可忽略不计。 参见下图对负载坐标系的定义。
TAG:
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
