
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

工业机器人伺服电机过载否的确定方法 【图】
关键词:工业,机器人,伺服,电机,过载,确定,方法,传动,皮带,除掉1、将传动皮带除掉,用手滚动被股动的机器主轴,看主轴滚动是不是灵敏。若被股动的机器损坏有些或脏污的组织阻碍主轴灵敏滚动,即为过载。 2、将电流表与电源串联,工业机器人伺服电机有载运行时,若电流表的读数大于工业机器人伺服电机铭牌上额定值,即标明... 阅读更多>>
2017-02-14 -
工业机器人伺服电机电磁噪声的抑制方法 【图】
关键词:工业,机器人,伺服,电机,电磁,噪声,抑制,方法,工业,机器工业机器人伺服电机的电磁噪声辐射首要取决于气隙中电磁激振力(径向力)、工业机器人伺服电机构造的振荡响应以及工业机器人伺服电机外表声辐射特性。因此下降工业机器人伺服电机噪声的各种办法能够归结为: (1)下降电磁激振力及提高其力波次数。 (2)下... 阅读更多>>
2017-02-14 -
安川伺服电机电刷滑动音原因及处理方法 【图】
关键词:安川,伺服,电机,电刷,滑动,原因,处理,方法,安川,伺服,安川伺服电机电刷滑动音原因: 整流子与电刷的滑动时的电机振动电刷保持器激振产生 安川伺服电机电刷滑动音对策: 握刷的弹性支持、选择电刷材质与形状、抑制侧压引起的电刷电机振动及提高整流子的精度等。... 阅读更多>>
2017-02-14 -
安川直流伺服电机主要噪声和抑制方法 【图】
关键词:安川,直流,伺服,电机,主要,噪声,抑制,方法,噪声,各种,噪声是各种频率和不同强度的杂乱声音的组合,这种令人讨厌的声音对人类的危害是众所周知的。噪声往往伴随振动而产生,振动过大还会损坏其他设备。振动噪声水平反映了产品设计、制造的水平,是衡量产品质量的重要指标。现在人们已普遍认识到降低噪声的重要性... 阅读更多>>
2017-02-11 -
ABB直流伺服电机温升过高原因及其处理方法 【图】
关键词:ABB,直流,伺服,电机,温升,过高,原因,及其,处理,方法ABB直流伺服电机温升过高原因: (1)长期过载 (2)通风不良 (3)电枢绕组或换向器有短路现象 (4)定转子相擦 (5)电压过低或过高 (6)并励绕组部分短路 ABB直流伺服电机温升过高排除方法: (1)减轻负载 (2)检查风扇是否正常,风道是否畅通 (3)检... 阅读更多>>
2017-02-11 -
KUKA机器人PC风机故障原因及其处理方法 【图】
关键词:KUKA,机器人,风机,故障,原因,及其,处理,方法,提示,提示文字:PC风机故障。 原因 :PC控制器得不到长时间冷却,长期工作将影起部件损坏。 查询 :动态。 影响 : KUKA机器人 长期工作将会停在运行。 应急措施, :立即 检查 KUKA机器人PC风机或更换。... 阅读更多>>
2017-02-10 -
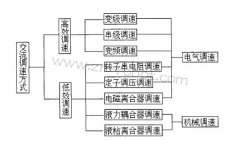
ABB交流伺服电机调速的原理及方法 【图】
关键词:ABB,交流,伺服,电机,调速,原理,方法,ABB,交流,伺ABB交流伺服电机有两种:一是ABB交流异步伺服电机,二是ABB交流同步伺服电机。我国各类伺服电机的装机容量已超过4亿KW,前者应用较多,其中异步伺服电机约占90%。在实际应用场合,往往要求伺服电机能随意调节转速,以满足生产工艺及节能要求。异步伺服电机的... 阅读更多>>
2017-02-10 -
FANUC机器人程序中断和恢复原因及其处理方法 【图】
关键词:FANUC,机器人,程序,中断,恢复,原因,及其,处理,方法程序中断由以下两种情况引起: ■ 程序运行中遇到报警 ■ 操作人员停止程序运行 程序的中断状态有两种类型: 有意中断程序运行的方法: ■ 按下TP或操作箱上的急停按钮,还有可以输入外部E-STOP信号。 输入UI[1] *IMSTP ■ 按一下TP上的HOLD(暂停)键。 输... 阅读更多>>
2017-02-08 -

KUKA机器人系统改变启动顺序操作方法 【图】
关键词:KUKA,机器人,系统,改变,启动,顺序,操作,方法,这个,这个选项确定一个K UKA机器人 操作系统中搜寻不同 驱动 的顺序。通常,在这儿软盘驱动器无效。为了安装一 个新的操作系统,该设置需要改变。 在主菜单选择选项SOYO COMBO Feature,按下回车键。 下列插图中,仅启动装置是重要的。 用箭头键选择输入。用PgUp... 阅读更多>>
2017-02-06 -

KUKA机器人编程中KRL初始化说明及其初始化的方法 【图】
关键词:KUKA,机器人,编程,KRL,初始化,说明,及其,方法,KKUKA机器人编程中KRL初始化说明及其初始化的方法如下: 1.KUKA机器人编程每次声明后变量都只预留了一个存储位置,值总是无效值 2.在KUKA机器人编程SRC文件中声明和初始化始终在两个独立的行中进行 3.在DAT文件中声明和初始化始终在一行中进行 常量必须在KUKA... 阅读更多>>
2017-02-05 -
KUKA机器人采用统一编程方法的目的 【图】
关键词:KUKA,机器人,采用,统一,编程,方法,目的,KUKA,机KUKA机器人采用统一编程方法,以便: 1、通过严密的分段结构方便地解决复杂的问题 2、以清晰易懂的方式展示KUKA机器人基本方法(无需深度编程知识) 3、提高维护、修改和扩展KUKA机器人程序的效率 前瞻性程序规划可: 1、使复杂的任务得以分解成几个简单的分... 阅读更多>>
2017-02-04 -
KUKA机器人“电压过低”原因分析及其解决方法 【图】
关键词:KUKA,机器人,电压过低,原因分析,及其,解决,方法,提示提示文字:电压过低〈轴号 原因:KUKA机器人伺服输出级的内部工作电压(+15V)将受到监控。KUKA机器人电压过低时 将出现无电压的信号。 查询: 动态。 影响:1.信号斜坡停止。 2.程序处理停止。 应急措施:排除故障。通过操作KUKA机器人控制屏上的确认键对故... 阅读更多>>
2017-02-03
