
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-
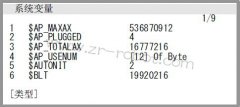
FANUC机器人零点位置标定的方法数据的输入方法 【图】
关键词:FANUC,机器人,零点,位置,定的,方法,数据,输入,FAFANUC机器人零点位置标定的方法数据的直接输入,可将FANUC机器人零点位置标定的方法数据值直接输入到系统变量中。这一操作用于FANUC机器人零点位置标定的方法数据丢失而脉冲数据仍然保持的情形。 FANUC机器人零点位置标定的方法数据的输入方法 1 、按下MENU... 阅读更多>>
2017-03-17 -

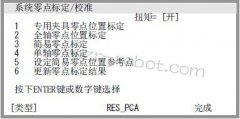
FANUC机器人如何设定零点位置标定的方法参考点? 【图】
关键词:FANUC,机器人,如何,设定,零点,位置,定的,方法,考点1、按下MENU键,选择6 SYSTEM。 2、通过画面切换选择Master/Cal。出现位置调整画面。 3、以点动(JOG)方式移动FANUC机器人,使其移动到零点位置标定的方法参考点。请在解除FANUC机器人制动器控制后进行操作。 4、选择5 SET QUICK MASTER REF(零点位置标定... 阅读更多>>
2017-03-17 -
FANUC机器人零点位置标定的方法步骤 【图】
关键词:FANUC,机器人,零点,位置,定的,方法,步骤,FANUCFANUC机器人零点位置标定的方法步骤 1、按下MENU键,显示出菜单画面。 2、按下0 NEXT(下一页),选择6 SYSTEM(系统)。 3、按下F1TYPE (类型),显示出画面切换菜单。 4、选择Master/Cal。出现位置调整画面。 5、以点动(JOG)方式移动FANUC机器人,使其... 阅读更多>>
2017-03-17 -

如何通过各种方法个性化ABB机器人FlexPendant 【图】
关键词:如何,通过,各种,方法,个性化,ABB,机器人,FlexPe可以通过各种方法个性化ABB机器人FlexPendant。方法如下: 操作: 1.改变窗口和对话框中使用的语言 2.改变显示器的亮度和对比度 3.将ABB机器人FlexPendant设置为左手使用或右手使用 4.配置视图启动程序定义操作模式 5.重新校准ABB机器人触摸屏 6.配置预设按... 阅读更多>>
2017-03-10 -
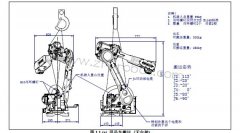
工业机器人正确的搬运方法 【图】
关键词:工业,机器人,正确,搬运,方法,FANUC,机器,人的,搬运FANUC机器人的搬运,采用吊车进行。搬运FANUC机器人时,务须采用如下所示的运送姿势,并在规定位置安装吊环螺钉。 一、警告 1.在用吊车来搬运FANUC机器人时,应慎重进行。将FANUC机器人放置在地板面上时,应注意避免FANUC机器人设置面强烈抵碰地板面。 2.安... 阅读更多>>
2017-03-08 -
FANUC机器人的正确停止方法 【图】
关键词:FANUC,机器,人的,正确,停止,方法,FANUC,机器,FANUC机器人有如下3种停止方法。 一、断电停止 (相当于IEC 60204-1 的类别0 的停止) 这是断开伺服电源,使得FANUC机器人的动作在一瞬间停止的、FANUC机器人的停止方法。由于在动作断开伺服电源,减速动作的轨迹得不到控制。 通过断电停止操作,执行如下处... 阅读更多>>
2017-06-03 -
ABB机器人FlexPendant处理和清洁方法 【图】
关键词:ABB,机器人,FlexPendant,处理,清洁,方法,AABB机器人FlexPendant的处置 ABB机器人FlexPendant是一种高品质的手持式终端,它配备了高灵敏度的一流电子设备。为 避免操作不当引起的故障或损害,请在操作时遵循本说明。 ABB机器人FlexPendant仅用于本手册指定的用途。按照适用安全标准研发、生产、测试和... 阅读更多>>
2017-03-03 -
三大常见工业机器人伺服电机的烧毁方法 【图】
关键词:三大,常见,工业,机器人,伺服,电机,烧毁,方法,常见,工业常见的工业机器人伺服电机的烧毁方法主要有三种:过载、缺相、短路。 (1)过载:打开工业机器人伺服电机观察 ,整个绕组线包颜色均变深发黑,端部绑带崩裂,严重时相间绝缘和槽口绝缘都因过热而熔化冒白泡。其原因主要是因工业机器人伺服电机过载超电流发热... 阅读更多>>
2017-03-01 -
降低工业机器人伺服电机表面振动的方法 【图】
关键词:降低,工业,机器人,伺服,电机,表面,振动,方法,添加,激振1)添加激振力波次数(力波极对数)。增大由谐波磁场产生的径向力波次数,首要靠合理挑选定转子槽合作完成。 (2)使首要的激振力频率与工业机器人伺服电机构造的固有振荡频率错开,为此要断定定子构造、转子体系与端盖的固有频率,并把这些固有频率与首要激... 阅读更多>>
2017-02-28 -
工业机器人直流伺服电机受潮几种的解决方法 【图】
关键词:工业,机器人,直流,伺服,电机,受潮,种的,解决,方法,工业工业机器人直流伺服电机受潮可以采用以下几种解决方法: 1、循环热风干燥法:用隔热材料做成一个干燥室(如用耐火砖砌筑),上面留有出风口,侧面有进风口。进风口与加热室相连通,加热室内绝缘地设置3kW左右的220V电炉丝(加热室也可采用其他方法加热)。加... 阅读更多>>
2017-02-21 -
工业机器人伺服电机过热或冒烟原因及排除方法 【图】
关键词:工业,机器人,伺服,电机,过热,冒烟,原因,排除,方法,工业工业机器人伺服电机过热或冒烟 原因: ①工业机器人伺服电机长期过载 ②电源电压过高或过低 ③电枢、磁极、换向极绕组故障 ④起动或正、反转过于频繁 排除方法: ①更换功率较大的工业机器人伺服电机 ②检查电源电压 ③分别检查原因 ④避免不必要的正、反转... 阅读更多>>
2017-02-21 -
改善安川机器人伺服电机启动性能的方法 【图】
关键词:改善,安川,机器人,伺服,电机,启动,性能,方法,改进,安川改进安川机器人伺服电机发动功能的办法 一般鼠笼式安川机器人伺服电机具有很多长处,但其直接发动电流较大,发动转矩却不大。用降压发动的办法来减小发动电流,但发动转矩也明显下降。为了改进电动机的发动功能,能够从转子槽形着手,利用集肤效应,使发动时... 阅读更多>>
2017-02-14
