
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

ABB机器人紧急停止的意义何在! 【图】
关键词:ABB,机器人,紧急,停止,意义,何在,紧急,停止,定义,优紧急停止的定义 紧急停止优先于任何其它ABB机器人控制操作,它会断开ABB机器人电机的驱动电源,停止 所有运转部件,并切断由ABB机器人系统控制且存在潜在危险的功能部件的电源。 紧急停止 状态意味着断开了ABB机器人中除手动制动器释放电路外的所机器人培训... 阅读更多>>
2017-04-13 -
要定义一个位置作为偏离指定位置的偏移值ABB机器人如何做? 【图】
关键词:定义,一个,位置,作为,偏离,指定,偏移,ABB,机器人,如有关偏移值 定义一个位置作为机器人保养偏离指定位置的偏移值有时更为容易。 例如,如果您知道某工件的具体尺寸,则只需移至一个位置即可。 偏移值根据工件在 x、y、z 方向上的位移距离设定。 例如: MoveL 。。。 (p10?100?50?0)?v50 使用下列表达式定义... 阅读更多>>
2017-04-12 -
KUKA机器人定义的中断数大于16怎么办? 【图】
关键词:KUKA,机器人,定义,中断,大于,怎么办,提示,文字,定义提示文字:定义的中断数大于16 原因 : 程序指令中断接通无法接通16 个以上的中断。而被定义的中断太多机器人培训。 查询 : 程序处理时。 影响 : 斜坡制动。 应急措施: 减少中断数量。... 阅读更多>>
2017-04-10 -

ABB机器人如何定义例行程序中的参数? 【图】
关键词:ABB,机器人,如何,定义,例行,程序,中的,参数,文章,介本文章介绍如何定义例行程序中的参数。 操作 1. 在例行程序声明中,点击 返回例行程序声明。一个已定义参数的列表将显示。 2. 如无参数显示,请点击 添加 添加新参数。 a、 添加可选参数 可添加可选的参数 b、 添加可选互用参数 可添加一个与其它参数互用的... 阅读更多>>
2017-04-07 -
如何显示ABB机器人有效载荷定义? 【图】
关键词:如何,显示,ABB,机器人,有效,载荷,定义,概述,使用,有概述 使用有效载荷数据,设置有效载荷的物理属性机器人维修(例如重量和重心)。 操作 1. 在 ABB 菜单中,点击微动控制。 2. 点击有效载荷,显示可用有效载荷的列表。 3. 选择您想要编辑的有效载荷,然后点击编辑。 4. 点击更改值。显示有效载荷数据。... 阅读更多>>
2017-04-01 -
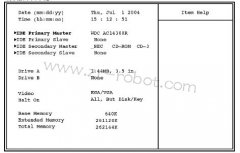
KUKA机器人怎么定义硬盘参数 (标准CMOS 设置)? 【图】
关键词:KUKA,机器人,怎么,定义,硬盘,参数,标准,CMOS,设如果新安装的硬盘和以前的不同,系统会自动发现。如果没有发现,BIOS 中必须做相应的设置。 用箭头键选择选项标准CMOS 设置,按下回车键。选择相应的IDE(硬盘默认设置主控制), 再次按下回车键。 如果需要, 设置 IDE 和 Access Mode 为Auto。用同样的方法... 阅读更多>>
2017-03-29 -
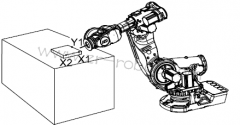
ABB机器人如何定义工件框架? 【图】
关键词:ABB,机器人,如何,定义,工件,框架,这里,介绍,工件,框这里介绍将工件框架偏移用户框架时如何定义工件框架。 x 轴将通过点 X1-X2,y 轴通过 Y1。 操作 1. 在 工件方法 弹出式菜单中,点击 3 点 。 2. 定义方法参见定义用户框架用户手册。... 阅读更多>>
2017-03-28 -
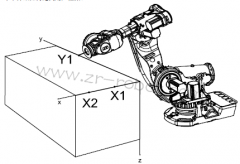
ABB机器人定义用户框架? 【图】
关键词:ABB,机器人,定义,用户,框架,这里,介绍,如何,定义,用这里介绍如何定义用户框架。 x 轴将通过点 X1-X2,y 轴通过 Y1。 操作 1. 在 用户方法 弹出式菜单中,点击 3 点 弹出式菜单中,点击 2. 按下使动装置,将机器人移至您要定义的第一个点(X1、X2 或 Y1)。(X1 和 X2 之间的距离越大,定义就越精 确。) 3. 选... 阅读更多>>
2017-03-27 -
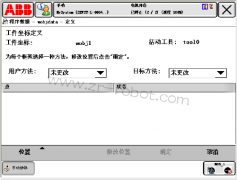
ABB机器人定义用户框架或工件框架或定义二者的方法 【图】
关键词:ABB,机器人,定义,用户,框架,工件,二者,方法,概述,定概述 定义工件意味着ABB机器人将用于指出其所在位置。 共需定义三个位置,两个位于 x 轴上,一个位于 y 轴上。 您定义工件时可以使用用户框架或工件框架,或者两者同时使用。 用户选择框架与 工件框架通常是重合的。 如果不一致,工件框架将偏移于用户框架。... 阅读更多>>
2017-03-27 -
ABB机器人编辑工具定义步骤 【图】
关键词:ABB,机器人,编辑,工具,定义,步骤,操作,输入,工具,中操作 1. 输入工具中心点位置的笛卡尔坐标。 实例: tframe.trans.x tframe.trans.y tframe.trans.z [ 毫米] 2. 如果必要,输入工具的框架定向。 实例: tframe.rot.q1 tframe.rot.q2 tframe.rot.q3 tframe.rot.q4 无 3. 输入工具重量。 实例: tload.mass [... 阅读更多>>
2017-03-25 -
ABB机器人如何测量工具中心点? 【图】
关键词:ABB,机器人,如何,测量,工具,中心点,定义,工具,中心点定义工具中心点 TCP 的最简单方式通常是使用预定义方法,详情请参阅定义工具框页 148。如果您使用此方法,则无需写入任何 tframe 数值,因为此方法已提供这些数值。 如果您已具有工具的测量值,或出于某些原因想手动测量数值,则这些数值可以输入至工具数据... 阅读更多>>
2017-03-27 -
ABB机器人如何定义延伸器点? 【图】
关键词:ABB,机器人,如何,定义,延伸,器点,步骤,介绍,如何,通本步骤介绍如何通过指定 z 和/或 x 轴的方向来定义工具框的方向。 只有在工具方向应不同与ABB机器人基座方向时,才需执行此操作。 默认情况下,工具坐标系与tool0 的坐标系类似 操作 1. 在不改变工具方向的情况下,移动ABB机器人,使参考大地坐标点成为所需... 阅读更多>>
2017-03-23
