
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-
IngsollRang|英格索兰拧紧控制器维修系统测试
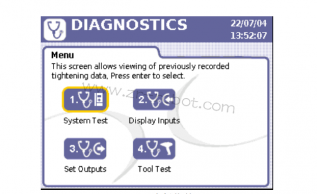
关键词:英格索兰拧紧控制器维修,拧紧控制器维修,直流紧固控制器Diagnostics(诊断)菜单允许您检查Insight IC-D的整体系统状态。该功能也可以诊断系统问题。 Diagnostics(诊断)子菜单,其中包含: ... 阅读更多>>
2024-11-28 -
英格索兰IR拧紧控制器维修故障测试 修复
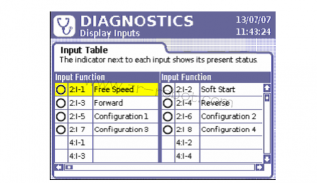
关键词:IngsollRang拧紧控制器,伺服拧紧轴控制器,电动扳手Display Inputs(显示输入)屏幕允许您查看控制器的离散输入状态。 I/O(输入/输出)连接器在IngsollRang拧紧控制器的左侧面板。 虽然每个输入行为均在ICS软件中进行编程,该屏幕也有助于输入/输出的故障排除。 例如,如果控制器不是从PLC开始运行周期,您可 ... 阅读更多>>
2024-11-28 -

史陶比尔STAUBLI机器人维修CS8C控制器解决方案
关键词:机器人CS8C控制器维修,STAUBLI机器人维修,机械手控机器人CS8C控制器内置了一个功能强大的FTP服务器,这一设计极大地便利了用户的文件管理工作。通过利用免费的FTP客户端软件Ftpsurfer,用户可以轻松地上传和下载控制器内部存储的所有文件,实现了数据的便捷交互与管理。 ... 阅读更多>>
2024-11-28 -
YASKAWA安川ES165机器人维修L轴电机更换实例
关键词:ES165机器人维修,安川机器人维修,机器人L轴电机维修先需要细致地观察机器人的运行状态。在这一过程中,务必全神贯注,留意任何异常声音的出现,这些声音可能尖锐、沉闷或持续,它们往往是电机内部问题的直接反映。要密切关注机器人控制面板上是否有错误代码的显示,这些代码如同电机的“求救信号”,指示着潜在 ... 阅读更多>>
2024-11-28 -

KUKA机械手维修KCP4示教盒系故障排除
关键词:库卡机器人示教器维修,KUKA机械手维修,机械手示教器维修在进行故障排查时,应遵循先软件后硬件的原则,即首先尝试通过软件方面的解决方案来解决问题;如果问题依旧存在且初步判断可能是硬件方面的问题时,再逐步检查通信电缆、通信参数、通信接口以及按键等硬件部件的状态并进行相应的KUKA机械手维修或更换。 ... 阅读更多>>
2024-11-28 -

ABB机器人维修DSQC679示教器拆卸过程
关键词:ABB机器人维修,机器人DSQC679示教器,ABB机械手示先需使用小型螺丝刀拆下两个十字螺丝,随后轻轻扳开盖板,这一过程中,小螺丝刀的辅助将起到关键作用。接下来,按住卡扣,小心拔下水晶头和线缆。若需更换电缆,则需拔掉旧电缆,替换为新的电缆,并重新盖上盖板,整个过程需参照图示操作。 ... 阅读更多>>
2024-11-27 -
机器人维修减速机故障原理分析
关键词:机器人减速机维修,工业机器人手臂,机器人减速机故障在机器人维修减速机齿轮不断的啮合滚动摩擦与滑动摩擦中,齿轮之间的间隙会逐渐增大。这种间隙的变化,会进一步导致齿间隙空程的逐步变化,具体表现为机械臂的抖动、电机扭矩的过载保护等现象。 ... 阅读更多>>
2024-11-27 -

MOTOMAN安川MH24机械手维修运行时抖动
关键词:安川MH24机器人,机器人维修,机器人减速机故障减速机结合面的渗漏也是一个常见的故障现象。这主要表现在减速机箱体结合面、轴承端盖处的渗漏油现象。这主要是由于结合面密封垫片或密封胶料涂抹工艺存在纰漏所导致的。检修工艺不当也可能导致此类问题。 ... 阅读更多>>
2024-11-26 -

松下焊接机械手维修G2减速机排除方法
关键词:机械手G2减速机维修,Panasonic焊接机器人,松下焊接当机械手G2减速机发生故障后,应迅速进行更换,确保设备在最短的时间内恢复正常运转。随后,对拆解下来的减速机进行详细观察和分析,明确故障情况。对于易损坏的部件,如密封圈等,应购置适量的备件进行留存。对于因产品本身质量问题导致的故障,应针对不同的 ... 阅读更多>>
2024-11-26 -

库卡KUKA机械手维修RDC板四部曲
关键词:KUKA机械手维修,机器人RDC板维修,机械手RDC板故障在进行检测工作时,需遵循“先外后内”的原则。若条件允许,最好准备一块与待修板完全相同的、功能完好的机器人电路板作为参照。随后,机器人维修技术人员会利用测试仪的双棒VI曲线扫描功能,对两块电路板进行详尽的好坏对比测试。 ... 阅读更多>>
2024-11-26 -

川崎RS030N机械手臂维修伺服电机发热问题
关键词:RS030N机械手臂维修,川崎机器人维修,机械手伺服电机发热在运转过程中,还需对轴承的滚动声、振动、润滑状态等关键指标进行检查。如,采用测声器对轴承的滚动声进行检测,可以及时发现轴承的轻微损伤;通过特殊的轴承振动测量器测量振动大小,可以推断出轴承的异常具体情况;而定期监测轴承的变化,则可以及时发现润 ... 阅读更多>>
2024-11-25 -

EPSON爱普生C12XL六轴机械手维修电机故障类型
关键词:C12XL六轴机械手维修,爱普生机械手维修,机器人电机故障在伺服电机的日常使用过程中,若未能遵循正确的操作方法或忽视了必要的维护保养,往往会引发一系列故障,这些故障形形色色,包括但不限于电机温度异常升高、电机外壳带电现象、伺服电机的窜动与爬行问题、电机振动不安、转矩明显下降乃至电机完全停止运转等。 ... 阅读更多>>
2024-11-25
