
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 机器人维修服务 > 机器人示教器维修 > ABB机器人虚拟示教器系统应用与实践
ABB机器人虚拟示教器系统应用与实践
ABB机器人示教器维修, ,
, ,ABB示教盒维修,
,ABB示教盒维修, ,机器人维修等,可以咨询广州子锐机器人技术有限公司,本公司是一家第三方工业机器人维修服务商,服务电话:400-878-2528;手机:15889988091。
,机器人维修等,可以咨询广州子锐机器人技术有限公司,本公司是一家第三方工业机器人维修服务商,服务电话:400-878-2528;手机:15889988091。
1.认识ABB虚拟示教器
如图3.1所示在“离线”子菜单下有一个“虚拟示教器”,点击它会出现如图3.2所示界面。点击示教器左上角”ABB”转到图3.3所示示教器主界面。

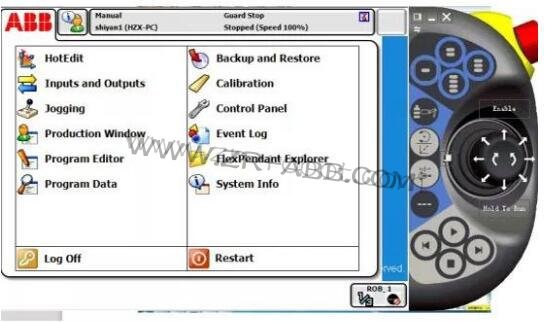
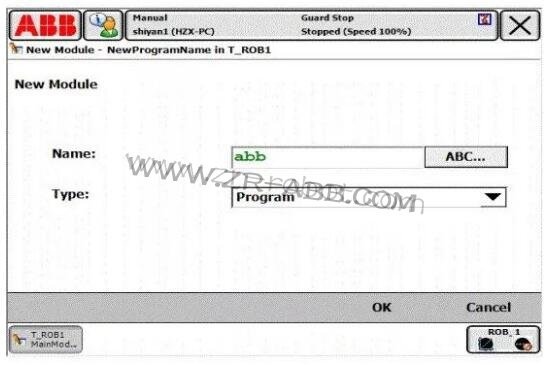
2.在虚拟示教器上建立新程序项目
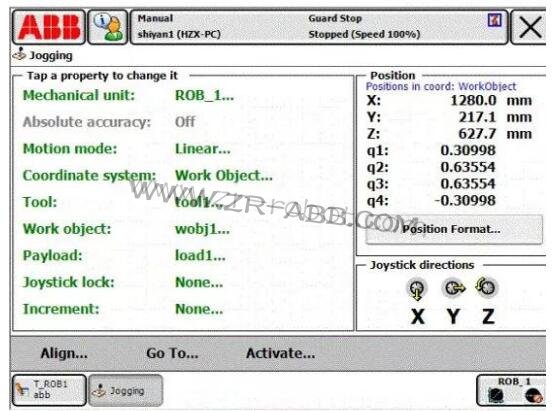
在图3.3中点击进入“ Program Editor”界面,如图3.4所示进入界面后新建一个取名为“abb”的新程序。然后回到虚拟教器主界面,点击进入“Jogging”界面,在“ Jogging”界面将“ Motion mode”和“ Coordinatesystem”分别选择为“ Linear”和“ Work Object”类型,并新建“Tool” “ Work object”、“ Pay load”三个项目。如图3.5a、图3.5c、图3.5d所示。其中 Tool1的“ Initial Value”类型中“x.y.z”数值都改为80,“mass”的数值改为1,如图3.5b所示
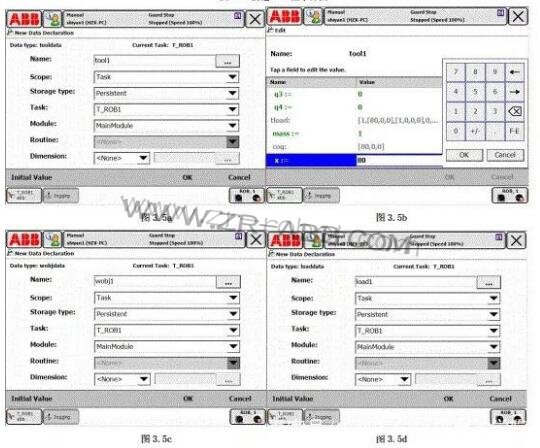
建立好的 Jogging界面如图3.6所示
3.程序的编写
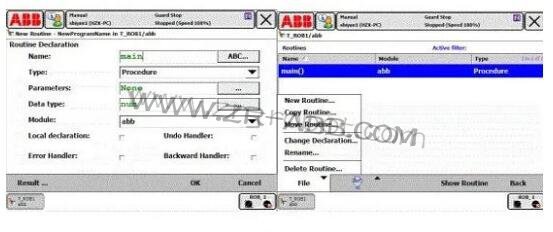
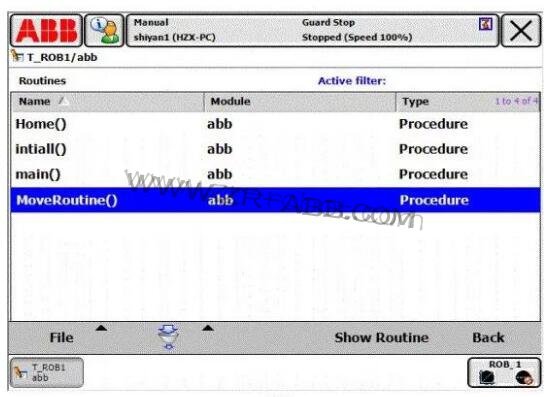
回到虚拟教器主界面,进入“ Program Editor”界面,如图3.7所示,在“ab”程序内建立“main”函数和几个子函数。建立好的函数见图3.8所示。其中“main()”是主函数,“ Intial()”是初始化函数。“ MoveRoutine()”是机器人运动指令函数,“Home()”是机器人回原点函数。
“ Intial()”初始化函数
如下图3.9所示为初始化函数程序,图中 AccSet和 Velvet都是运动控制指令。 AccSet100,100;是加速度设定指令Verset100,50000;是速度设定指令

“ Move routine()”机器人运动指令函数
如下图3.10a所示
MoveJ p10,v200,z1, toolllwobj:wobj1;表示机器人将携带工具tool沿着一个非线性路径到绝对轴位置p10,以速度数据v200和zone数据z1。
Movep20,v200,z1, toolllwobj: obj 1;表示机器人将携带工具tool沿着一直线路径由绝对轴位置 p10 到绝对轴位置 p20,以速度数据v200和zone数Movel p30,v200,fine, toollwobj:wobj1;表示机器人将携带工具tool沿着直线路径由绝对轴位置p20到绝对轴位置p30,以速度数据v200和zone数据fine。
其中绝对轴位置pl0、p20、p30要自己建立如图3.10b所示,并用手动移动机器人到相应的不同位置,然后分别设定好绝对轴位置。

“ Homeo”机器人回原点函数
如图3.11a所示。
MoveJ pHome,vl50,fine, toolllwobj: wobjl;表示机器人将携带工具 tool沿着一个非线性路径回到原点位置 pHome,以速度数据v150和zone数据fine
