

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-

专业工业机器人DSQC626A 3HAC026289-001电源模块维修
关键词:专业,工业,机器人,DSQC626A,3HAC026289-DSQC661 3HAC026253-001电源单元维修 DSQC661 3HAC026253-001电源单元维修 DSQC661 3HAC026253-001电源单元维修程序现场调试通过后,才可以交给用户使用,或试运行。现场调试要事先编制好调试大纲。依照大纲,按部就班地一步步推进。 DSQC661 3HAC026253-001 ... 阅读更多>>
2017-05-08 -

专业安川DX100示教器JZRCR-YPP01-1维修
关键词:专业,安川,DX100,示教,JZRCR-YPP01-1,维DX100示教器JZRCR-YPP01-1维修 DX100示教器JZRCR-YPP01-1维修 本公司提供:安川motoman莫托曼机器人示教显示器维修,安川莫托曼示教显示器维修,安川示教显示器维修,安川示教显示器维修,安川手柄维修|安川机器人保养,安川机械手维修,安川焊机维修等。 我 ... 阅读更多>>
2017-04-27 -

专业FANUC机器人A05B-2316-C105 维修
关键词:专业,FANUC,机器人,A05B-2316-C105,维修A05B-2316-C105 FANUC机器人维修 A05B-2316-C105 FANUC机器人维修 供应A05B-2316-C105、发那科机器人示教器、快速维修、价格实惠 发那科喷涂机器人A05B-2316-C105示教器维修FANUC发那科机器人A05B-2316-C105示教盒备件销售 配件回收服务 广州子锐机器人技术 ... 阅读更多>>
2017-05-27 -

专业KUKA KSP 600-3X64 00-198-269维修
关键词:专业,KUKA,KSP,600-3X64,00-198-26KSP 600-3X64 00-198-269维修 KSP 600-3X64 00-198-269维修 名称:库卡C4机器人驱动 型号:KSP 600 3X64 订货号:00-160-155 库存:原装正品及二手备件齐全,库卡备件齐全。 优势提供KUKA库卡机器人维修,安装,培训,保养,改造服务 ---KUKA机器人系统集成 ... 阅读更多>>
2017-05-11 -
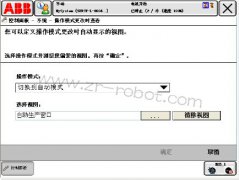
ABB机器人定义操作模式更改视图的操作步骤
关键词:ABB,机器人,定义,操作,模式,更改,视图,操作步骤,操作操作模式更改视图 本方法可用于,例如,当切换到自动模式时,显示一个非 运行时窗口 视图。 定义操作模式更改视图 使用程序配置 FlexPendant,机器人驱动器使之在更改操作模式时自动显示指定的视图。 操作 1. 在 ABB 菜单上,点击控制面板,然后点击 FlexPen ... 阅读更多>>
2017-04-30 -
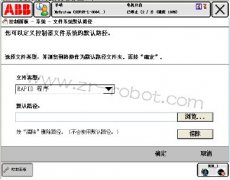
ABB机器人怎么样设置默认路径
关键词:ABB,机器人,怎么样,设置,默认,路径,默认,路径,简介,默认路径简介 您可以使用 FlexPendant 设置某些操作的个别默认路径。 可设置下面的默认路径: 1、 保存和加载 RAPID 程序。 2、 保存和加载 RAPID 模块。 3、 备份和恢复。 4、 保存和恢复配置文件。 此功能在登录用户已被授权的情况下可用。 用户授权通过 R ... 阅读更多>>
2017-04-30 -
ABB机器人要运行4点 XZ 校准入操作?
关键词:ABB,机器人,运行,4点,准入,操作,操作,参考,信息,A操作参考信息 1. 在 ABB 。 校准 更改参照点。 基座 菜单,然后点击 2. 点击 4 点 XZ 。然后选择机器人驱动器包含这些值的文件。加载文件。 3. 在ABB机器人工作范围内设置固定参照点。 4. 点击 更改参照点。 输入固定参照点的坐标 显示一个数字键盘和包含 X ... 阅读更多>>
2017-04-27 -
ABB机器人在创建备件时如何删除存储于SMB 内存或控制器内存中的数据?
关键词:ABB,机器人,创建,备件,如何,删除,存储,SMB,内存,删除SMB 数据 本节介绍在创建备件时如何删除存储于SMB 内存或控制器内存中的数据。 操作 1. 在 ABB 。 校准 。 2. 点击 SMB 内存 删除选定的ABB机器人内存。重复此步骤可删除控制器内存中的所有ABB机器人内存。 高级 。 可用功能如下: a、清除机柜内存 b、 ... 阅读更多>>
2017-04-27 -
ABB机器人如何从控制器更新串行测量电路板上的数据?
关键词:ABB,机器人,如何,控制器,更新,串行,测量,电路板,数据更新 SMB 内存中的数据 本节说明如何从控制器更新串行测量电路板上的数据。 这是通过 RobotStudio 或使用 FlexPendant 将校准数据加载到控制器之后的示例。 如果 SMB 已包含数据,机器人驱动器您必须首先清除内存 1. 在 ABB 菜单上,点击校准,然后选择一个 ... 阅读更多>>
2017-04-26 -
ABB机器人要将串行测量电路板数据加载到控制器怎么操作?
关键词:ABB,机器人,要将,串行,测量,电路板,数据,加载,控制器通过SMB 内存更新控制器数据 本文介绍如何将串行测量电路板数据加载 到 控制器。 操作参考信息 1. 在 ABB 菜单上,机器人驱动器点击校准,然后选择一个机械单元。 2. 点击 SMB 内存,然后点击更新。 3. 点击 已交换机柜或操纵器 确认并重新启动机器人系统。 ... 阅读更多>>
2017-04-26 -
ABB机器人如何查看串行测量电路板和控制器中的数据状态?
关键词:ABB,机器人,如何,查看,串行,测量,电路板,控制器,中的查看SMB 数据状态 本文介绍机器人驱动器如何查看串行测量电路板和控制器中的数据状态。 操作 1. 在 ABB 菜单上,点击校准,然后选择一个机械单元。 2. 点击 SMB 内存 ,然后点击 显示状态 。 显示SMB 和控制器的数据及其状态。 ... 阅读更多>>
2017-04-26 -
ABB机器人要微校如何操作?
关键词:ABB,机器人,微校,如何,操作,概述,文章,介绍了,执行,概述 本文章介绍了执行ABB机器人微校时如何使用 FlexPendant。在每根轴上安装校准设备的方法请参阅ABB机器人产品手册中该轴的校准说明。 微校步骤 使用此程序用 FlexPendant 微校。 操作 1.警告 切勿在没有机器人驱动器轴校准专用设备的情况下微校机器人!否 ... 阅读更多>>
2017-04-26
