

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-

专业工业机器人KPS-600/20-ESC库卡电源模块维修
关键词:专业,工业,机器人,KPS-600,20-ESC,库卡,电源KPS-600/20-ESC库卡机器人电源模块维修 KPS-600/20-ESC库卡机器人电源模块维修 库卡机器人电源模块KPS-600/20-ESC坏了,哪里可以对KUKA机器人电源模块维修,库卡KPS-600/20-ESC维修费用是否合理?维修库卡电源是否迅速?来广州安川机电科技有限公司吧,我们 ... 阅读更多>>
2017-05-12 -

专业SGDR-SDA140A01B 安川外部轴驱动器维修
关键词:专业,SGDR-SDA140A01B,安川,外部,驱动器,维SGDR-SDA140A01B 安川外部轴驱动器维修 SGDR-SDA140A01B 安川外部轴驱动器维修 一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一一 名称:安川机器人外部轴驱动 型号:SGDR-SDA140A01B 数量:现货现货现货 维修安川机器人,备件 ... 阅读更多>>
2017-05-17 -
ABB机器人如何配置常用 I/O?
关键词:ABB,机器人,如何,配置,常用,配置,常用,程序,编辑器,配置常用 I/O 常用 I/O 由程序编辑器用于显示机器人系统中的常用 I/O 信号列表。 因为机器人驱动器可能有许多信号,所以使用此选择可能有帮助。 列表中的排序能以手动方式重新调整。在默认情况下,信号按创建的顺序进行排序。使用Man-machine Communication ... 阅读更多>>
2017-04-27 -
ABB机器人要更改日期和时间如何操作?
关键词:ABB,机器人,更改,日期,时间,如何,操作,更改,日期,时更改日期和时间 使用此程序设置控制器时钟。 操作 1. 在 ABB 菜单上,点击控制面板。 2. 点击 日期和时间 机器人驱动器使用时间和日期设置。 当前日期和时间显示。 3. 点击相应的 增加 或 减少 按钮更改日期或时间。 4. 点击 确定 。 附注 日期和时间总是按 ... 阅读更多>>
2017-04-27 -

ABB机器人如何调节 FlexPendant 为适合左利手用户使用?
关键词:ABB,机器人,如何,调节,FlexPendant,适合,左旋转 FlexPendant 屏幕 使用此程序调节 FlexPendant 为机器人驱动器适合左利手用户使用。 操作 1. 点击 ABB (或点击 控制面板 ,如果 FlexPendant 设置为右手操作)。 2. 点击外观。 3. 点击向右旋转。 4. 旋转 FlexPendant,将其移至另一只手。 ... 阅读更多>>
2017-05-01 -
ABB机器人要更改亮度和对比度怎么去操作?
关键词:ABB,机器人,更改,亮度,对比度,怎么,操作,更改,亮度,更改亮度和对比度 使用此程序更改屏幕亮度和对比度。 操作 1. 在ABB 菜单,点击控制面板。 2. 如果您希望进行慢速测试,点击外观。 3. 点击 加或减按钮调节级别。 如果您机器人驱动器希望进行慢速测试,点击默认设置 返回至默认值。 当更改级别时,亮度和对 ... 阅读更多>>
2017-04-27 -
如何定义“ 快速设置” 菜单之任务面板中的可选任务ABB机器人?
关键词:如何,定义,快速,设置,菜单,任务,面板,中的,可选,ABB定义显示哪些任务 使用此程序定义 快速设置 机器人驱动器菜单之任务面板中的可选任务。 操作 1. 在 ABB 菜单上,点击控制面板,然后点击 FlexPendant。 2. 点击任务面板设置。 3. 选择仅正常任务或所有任务。所有任务让所有trustlevel 设置为 No safety 的任 ... 阅读更多>>
2017-04-27 -
ABB机器在设定机器人位置时(此处称为目标)有什么可用的选项?
关键词:ABB,机器,设定,机器人,位置,此处,称为,目标,什么,用位置编程规则 本文详细说明了在设定ABB机器人位置时(此处称为目标)可用的选项。 它表示机器单 位根据设置将前往的位置。 新目标可根据以下任何一种机器人驱动器原则来命名: 1、 已创建新位置; * 或按顺序命名规则。 2、 已选定下一个已存在的连续位置。 ... 阅读更多>>
2017-04-27 -

ABB机器人为新的机器人位置定义命名规则如何操作?
关键词:ABB,机器,人为,新的,机器人,位置,定义,命名,规则,如位置命名简介 RAPID 程序中的ABB机器人位置可以是命名变量也可以是非命名变量(使用星号字符*)。 在设定新的移动指令时,程序员可选择 FlexPendant 应使用的命名规则。 定义位置编程规则 使用此程序为新的ABB机器人位置定义命名规则。 操作 1. 在 ABB 菜单 ... 阅读更多>>
2017-05-01 -
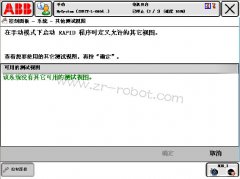
ABB机器人要定义一个其它测试视图如何操作?
关键词:ABB,机器人,定义,一个,其它,测试,视图,如何,操作,概概述 如果系统配有自定义操作员界面,该界面由一个或多个采用 Robot ApplicationBuilder 开发的应用程序组成,那么用户可以在手动模式下从此机器人驱动器类应用程序启动程序执行。 但是,如果没有此类应用程序,将显示添加其它测试视图的屏幕,如下图所示。 ... 阅读更多>>
2017-05-01 -
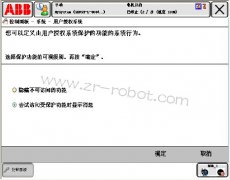
ABB机器人定义 UAS 保护功能的可视级别的步骤
关键词:ABB,机器人,定义,UAS,保护,功能,可视,别的,步骤,可视级别简介 本文介绍了如何定义 User Authorization System (UAS) 保护功能的可视性级别。保护功能可以隐藏或显示,但不能访问。 User authorization system机器人驱动器 的所有其它管理均可使用 RobotStudio 完成。 定义 UAS 保护功能的可视级别 操作 1 ... 阅读更多>>
2017-05-01 -
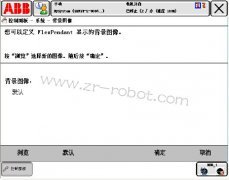
ABB机器人如何更改 FlexPendant 上的背景图像?
关键词:ABB,机器人,如何,更改,FlexPendant,背景,图背景图像 FlexPendant 上的背景图像可以更改。机器人驱动器控制器硬盘上的任何图像文件(照片及图示)都可使用。 为了达到最佳效果,使用符合以下建议的图像: 1、 640 x 390 万像素(宽、高) 2、 格式 gif 更改背景图像 使用本程序更改 FlexPendant 上的背 ... 阅读更多>>
2017-04-30
