

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-

发那科FANUC机器人本体电缆更换详细流程
关键词:发那科,FANUC,机器人,本体,电缆,更换,详细,流程,R对R-2000i机器人进行更换本体电缆操作,该型号的本体电缆分为动力电缆和编码器电缆,更换的方法类似。 使用工具清单: 内六角扳手一套、斜口钳、十字螺丝刀,一字螺丝刀、鱼嘴钳、退针器、尼龙扎带若干。 作业中安全用品一览: 安全帽、安全挂锁、手套、安全 ... 阅读更多>>
2019-12-31 -

福尼斯TPS4000/5000数字焊机指示灯点亮维修处理
关键词:尼斯,TPS4000,5000,数字,焊机,指示灯,点亮,维福尼斯TPS4000/5000数字焊机 故障指示灯---如果发生故障,指示灯点亮。 所有连在局域网上的有数字显示屏的部件都显示相关故障信息。 注意:可在故障分析一章中查看相应错误代码的含义。 机器人接口指示灯--ROB3000/4000/5000或总线连接器(ficldbus) ... 阅读更多>>
2019-12-30 -
发那科FANUC机器人KAREL程序的配置详解
关键词:发那科,FANUC,机器人,KAREL,程序,配置,详解,KKAREL程序支持功能的添加 之前都是使用ShiftFWD的方式执行手动执行PC程序,但如果想实现类似于TP程序后台逻辑一样的功能,则需要使用KAREL程序支持功能。使用KAREL程序支持功能,需要添加额外的软件包J971,即KARELUseSprtFCTN这个功能选项包,只有当添加了 ... 阅读更多>>
2019-12-30 -

KUKA库卡机器人如何实现PLC外部控制
关键词:KUKA,库卡,机器人,如何,实现,PLC,外部,控制,机器1、机器人与系统相连 如果机器人进程应由一个中央位置进行控制(如由一个主机或PLC),则这一控制通过外部自动运行接口进行。 PLC连接 2、系统结构原理 为了在KRC4和PLC之间能够顺利进行通讯,必须满足以下几点: 外部自动运行方式:在该运行方式下由一台主 ... 阅读更多>>
2019-12-30 -

ABB机器人示教器常见故障及维修
关键词:ABB机器人,示教器故障,维修ABB机器人示教器常见故障: 1:ABB机器人S4、IRC5示教器触摸不良或局部不灵 (更换触摸面板) 2:ABB机器人S4、IRC5示教器无显示 (维修或更换内部主板或液晶屏) 3:ABB机器人S4、IRC5示教器显示不良、竖线、竖带、花屏,摔破等(更换液晶屏) 4:ABB机器人 ... 阅读更多>>
2019-12-28 -

发那科FANUC机器人内部线缆更换(安装部分)
关键词:发那科,FANUC,机器人,内部,线缆,更换,安装,部分,通通过拆解,准备更换新的线缆,进行安装。 1、在装线缆之前,先在电缆有标记的位置进行安装和固定,包括一些尼龙保护带,电缆保护套等。 2、从2轴臂侧边插入电缆,同时引到1轴底座侧。 3、把2轴臂盖安装后再将3轴外套部穿入电缆。 4、在3轴外套部分线板上 ... 阅读更多>>
2019-12-28 -

干货系列-发那科FANUC机器人故障维修合集
关键词:干货,系列,-发,那科,FANUC,机器人,故障,维修,合集Q: FANUC系统有0M、0T、0MB、0MC、0MD、3M、6M、11M、15M、16M、18M、20M、21M,请问这些系统的区别是什么? A: 从旧到新 3 6 11 0 15 16 18 21 同样为0系统,0MB为老的型号,可能使用直流或S系列交流电机T和M区别是用于车床还是铣床。目前FANUC的主要产品为 ... 阅读更多>>
2019-12-26 -

KUKA库卡工业机器人外部轴配置方法
关键词:KUKA,库卡,工业,机器人,外部,配置,方法,连接,控制,1、连接控制柜和外部轴的动力线和编码器线 (外部轴动力线) (连接机器人底部RDC编码器线) 2、Workvisual外部轴添加与配置 (1)根据机器人控制柜内部实际的KPP和KSP型号添加: (右键控制系统组件添加) (2)确认电机铭牌上的电机型号: (开头MG/ME光轴 ... 阅读更多>>
2019-12-26 -
库卡KUKA机器人外部IO选择程序启动配置
关键词:库卡,KUKA,机器人,外部,选择,程序,启动,配置,库卡,一、库卡机器人启动方式了解 1、手动连续启动方式 (1)说明 在手动操纵模式下,手动选择要运行的程序,然后手动上电和手动运行程序的基本操作。 (2)大致操作步骤 A:编写程序和调试记录好点位等,然后手动模式下选定要运行的程序,选定程序后机器人状态栏 ... 阅读更多>>
2019-12-25 -
发那科FANUC发生报警MOTN-023或者MOTN-063奇异点的解决方法
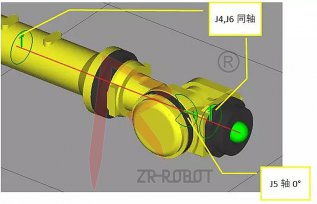
关键词:发那科,FANUC,发生,报警,MOTN-023,或者,MO在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。以下姿态即为奇异点位置。 图1机器人奇异点位置 当机器人J5轴处于0位置,机器人会出现MOTN-023报警: 图2MOT ... 阅读更多>>
2019-12-24 -

KUKA库卡机器人KRC4配置 Beckhoff I/O模块
关键词:KUKA,库卡,机器人,KRC4,配置,Beckhoff,模EtherCAT是EtherCATTechnologyGroup公司一种以以太网为基础的开放式 现场总线系统。 KRC4配置EtherCAT输入输出模块 一、硬件Hardware 二、软件Software 三、硬件连接Connection 参照电气图纸将硬件连接。 四、WorkVisual配置Configration 1.导入设备描述文件 ... 阅读更多>>
2019-12-24 -

ABB机器人维修操作盘功能介绍
关键词:ABB机器人维修,保养操作盘功能介绍 MOTORS ON: 马达上电。 Operating mode selector: 操作模式选择器。 AUTOMATIC: 自动模式。用于正式生产,编辑程序功能被锁定。 MANUAL REDUCED SPEED: 手动减速模式。用于机器人编程测试。 MANUALFULLSPEED:手动全速模式。只允许训练过的人 ... 阅读更多>>
2019-12-20
