
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > 库卡KUKA机器人 > KUKA库卡机器人KRC4配置 Beckhoff I/O模块
KUKA库卡机器人KRC4配置 Beckhoff I/O模块
时间:2019-12-24 点击: 来源:互联网 作者:匿名
简介:EtherCAT是EtherCATTechnologyGroup公司一种以以太网为基础的开放式 现场总线系统。 KRC4配置EtherCAT输入输出模块 一、硬件Hardware 二、软件Software 三、硬件连接Connection 参照电气图纸将硬件连接。 四、WorkVisual配置Configration 1.导入设备描述文件……
EtherCAT是EtherCATTechnologyGroup公司一种以以太网为基础的开放式
现场总线系统。
KRC4配置EtherCAT输入输出模块

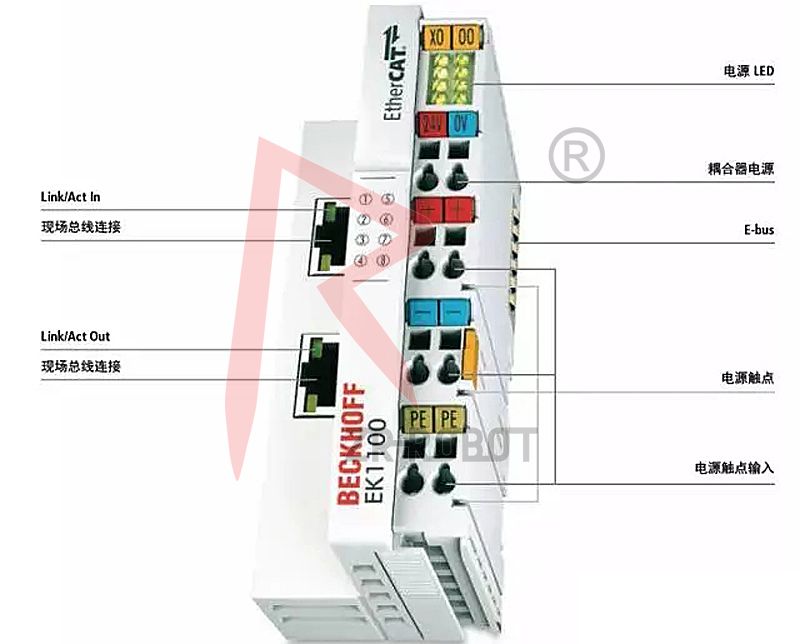
一、硬件Hardware
二、软件Software
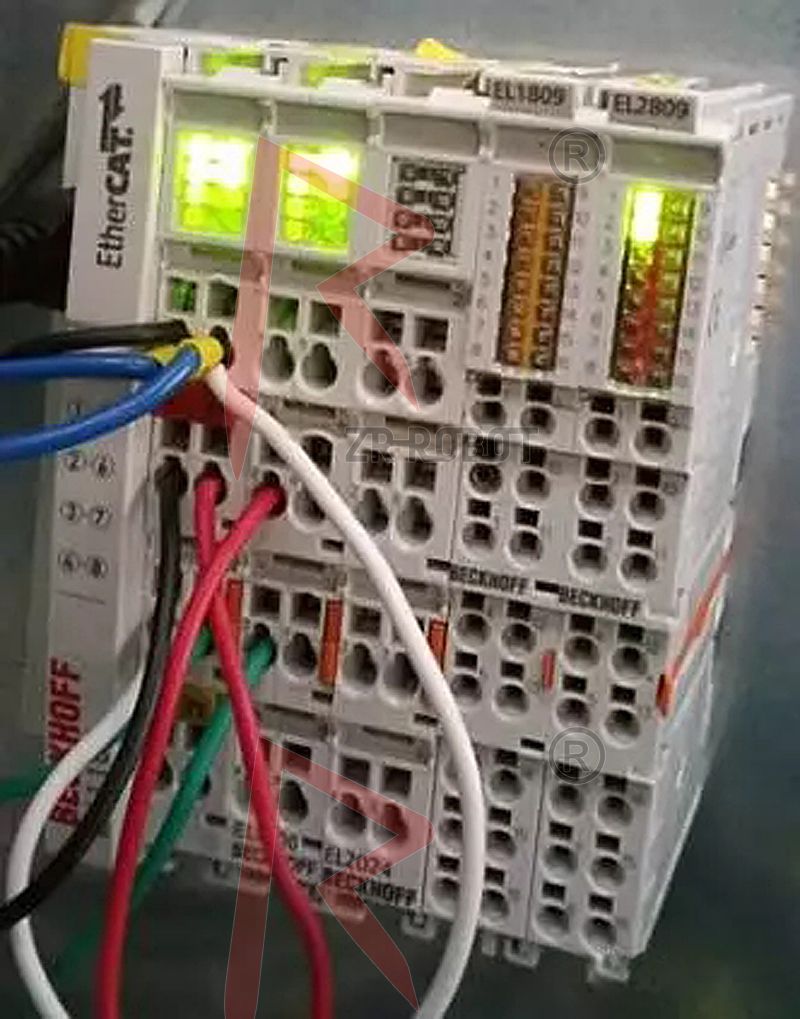
三、硬件连接Connection
参照电气图纸将硬件连接。
四、WorkVisual配置Configration
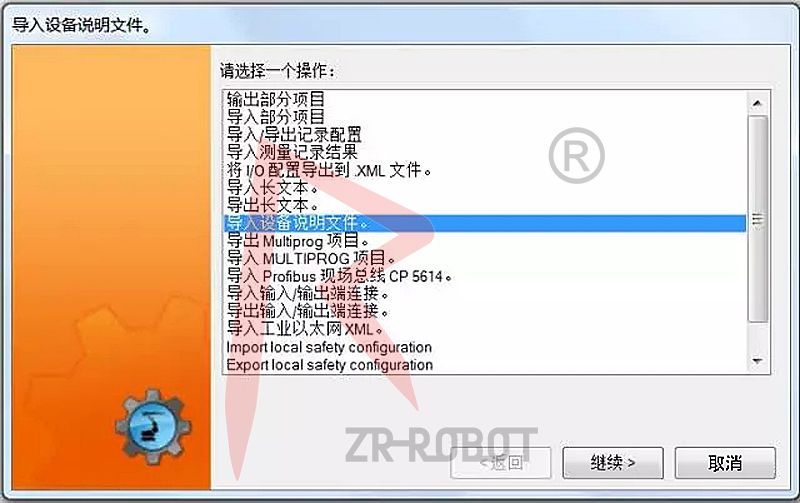
1.导入设备描述文件
参见Workvisual。这里需要导入EL1XXX和EL2XXX两个文件。对应输入模块EL1809、输出模块EL2024/EL2809。
注:根据模块的具体型号添加相应的devicedescription文件。

2.具体步骤:
打开Workvisual,菜单File---Import/Export---Importdevicedescriptionfile---选择文件类型ESI,选择导入,devicedescription导入完成。
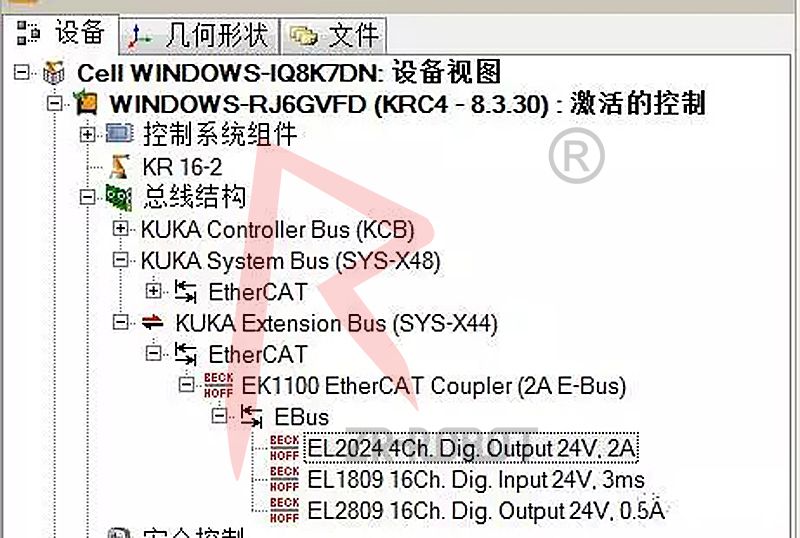
3.总线模块的配置
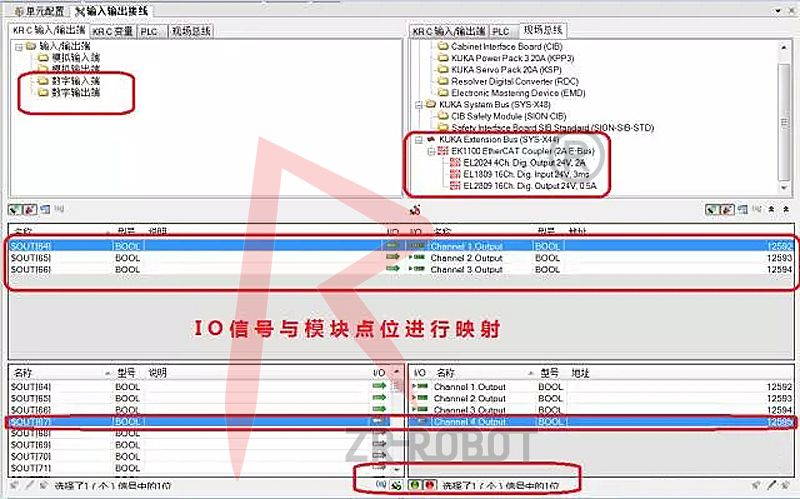
五、输入输出映射配置IOMapping
根据电气设计及电气信号的规划进行信号映射,在IOMAPPING窗口进行相应信号ID的IO映射。具体过程如下图所示。
六、项目配置安装ConfigurationDeployment
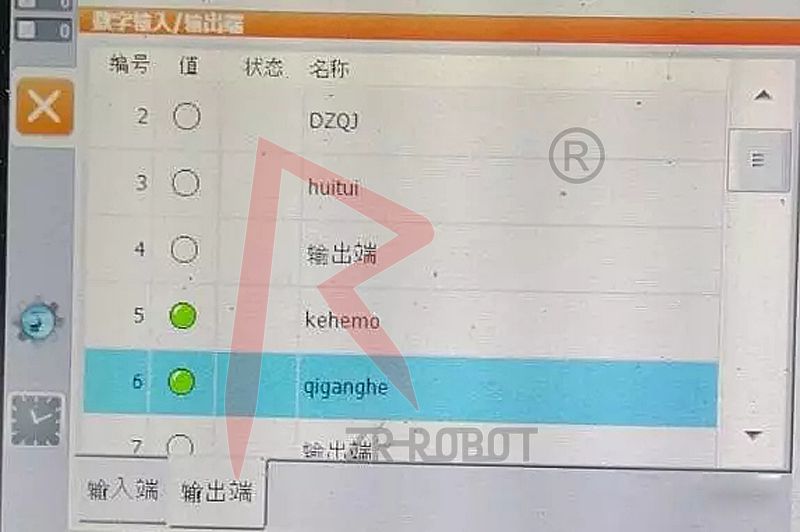
配置完成后,Deploy到KRC4控制器。注意观察SmartPAD上的消息以及模块的指示灯,并通过数字输出端强制输出信号,观察EL2809模块上的信号指示灯是否与10地址对应,确认模块通讯正常,配置正确!
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
