
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > 库卡KUKA机器人 > KUKA机器人维修中心手更换及零点校正
KUKA机器人维修中心手更换及零点校正
时间:2025-01-15 点击: 来源:互联网 作者:匿名
简介:将A4、A5、A6轴手动操作至零点机械标识位,确保各轴的位置准确无误。若机器人位置较高,可单独操作1、2、3轴,将中心手降低至合适的工作高度,然后接入EMD(电磁断路器)进行保护,再操作1、2、3轴回到预零点位。使用专业的零点校正仪对A4、A5、A6轴进行精确……
前期筹备工作:
- 需确保机器人系统处于完全关闭状态,具体操作是将机器人控制柜上的主电源开关拨至“关断(AUS)”位置,并加上安全挂锁,以防止任何未经授权的重新启动行为。
- 对工作环境的安全性进行全面检查,严格遵守所有既定的安全规范以及操作手册中的指示,确认每步的操作都在安全可控的范围内进行。

拆卸旧中心手的具体步骤:
- 使用专业工具松开固定手部的内六角头螺栓M10 x 170 / 10.9,这一步骤需谨慎操作,以防损坏螺栓或手部结构。
- 旋出手部固定螺栓,并按照箭头指示的方向,将手部平稳地水平拉出约20厘米的距离,此过程中需保持手部与机械臂的连接部分完好无损。
- 断开电机A6上的电机插头和传感器插头,将手部完全从小臂中分离出来,此步骤同样需要细致操作,以避免对电线或插头造成损伤。
- 在安装新的中心手之前,先在轴连接件和配合面上涂抹适量的Microlube GL261润滑剂,以确保安装的顺畅和部件间的良好配合。
- 使用合适的吊装设备将主机械手平稳提起,在水平位置——即吊在小臂前方约20厘米处——连接轴6的电机插头和传感器插头,此步骤需确保插头的正确对接和线路的顺畅布置。
- 小心地将主机械手沿箭头方向推入小臂,插入过程中需特别注意定位用的配合销和轴6的布线情况,以避免任何可能的干涉或损坏。
- 旋入20个内六角螺栓M10 x 170 / 10.9,并使用60Nm的扭矩进行交叉拧紧,确保手部与机械臂的紧密连接和稳固固定。
连接与校准环节:
- 连接轴4和轴5的电机插头和传感器插头,确保所有连接都准确无误。
- 在完成手轴的更换后,需进行零点标定操作,并按照事先记录好的轴的位置去安装工具,以确保6轴方向的工具能够正确安装并运行。
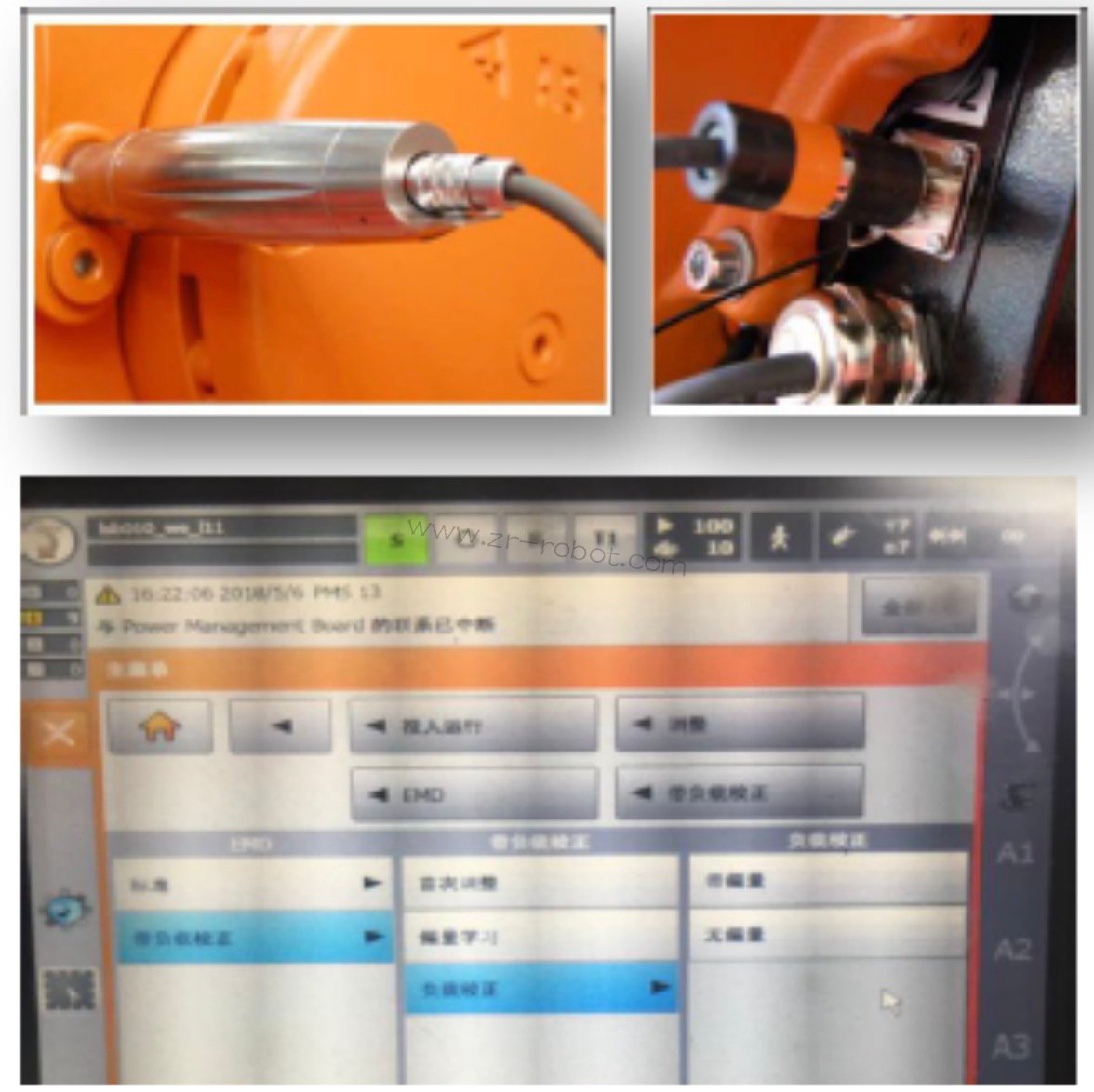
带负载带偏量零点校正步骤:
- 将A4、A5、A6轴手动操作至零点机械标识位,确保各轴的位置准确无误。
- 若机器人位置较高,可单独操作1、2、3轴,将中心手降低至合适的工作高度,然后接入EMD(电磁断路器)进行保护,再操作1、2、3轴回到预零点位。
- 使用专业的零点校正仪对A4、A5、A6轴进行精确的零点校正操作,以确保机器人的运行精度和稳定性。
在整个更换过程中,应始终保持对KUKA机器人维修各部件的细致检查与维护工作,及时发现并处理任何潜在的问题或隐患,以确保工业机器人能够长期稳定运行并发挥最佳性能。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
