
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > 库卡KUKA机器人 > 维修KUKA机械手KSS26012一般伺服误差
维修KUKA机械手KSS26012一般伺服误差
时间:2024-12-17 点击: 来源:互联网 作者:匿名
简介:库卡机器人维修KSS26012报警代码的出现,可能涉及多种原因。动力制动系统的激活、外部轴连接问题、程序数值溢出、散热器温度过高、电机封死、电流过大、制动故障、电源电压不稳定、超过调节极限以及总线电压充电单元故障等,都是常见的潜在因素。……
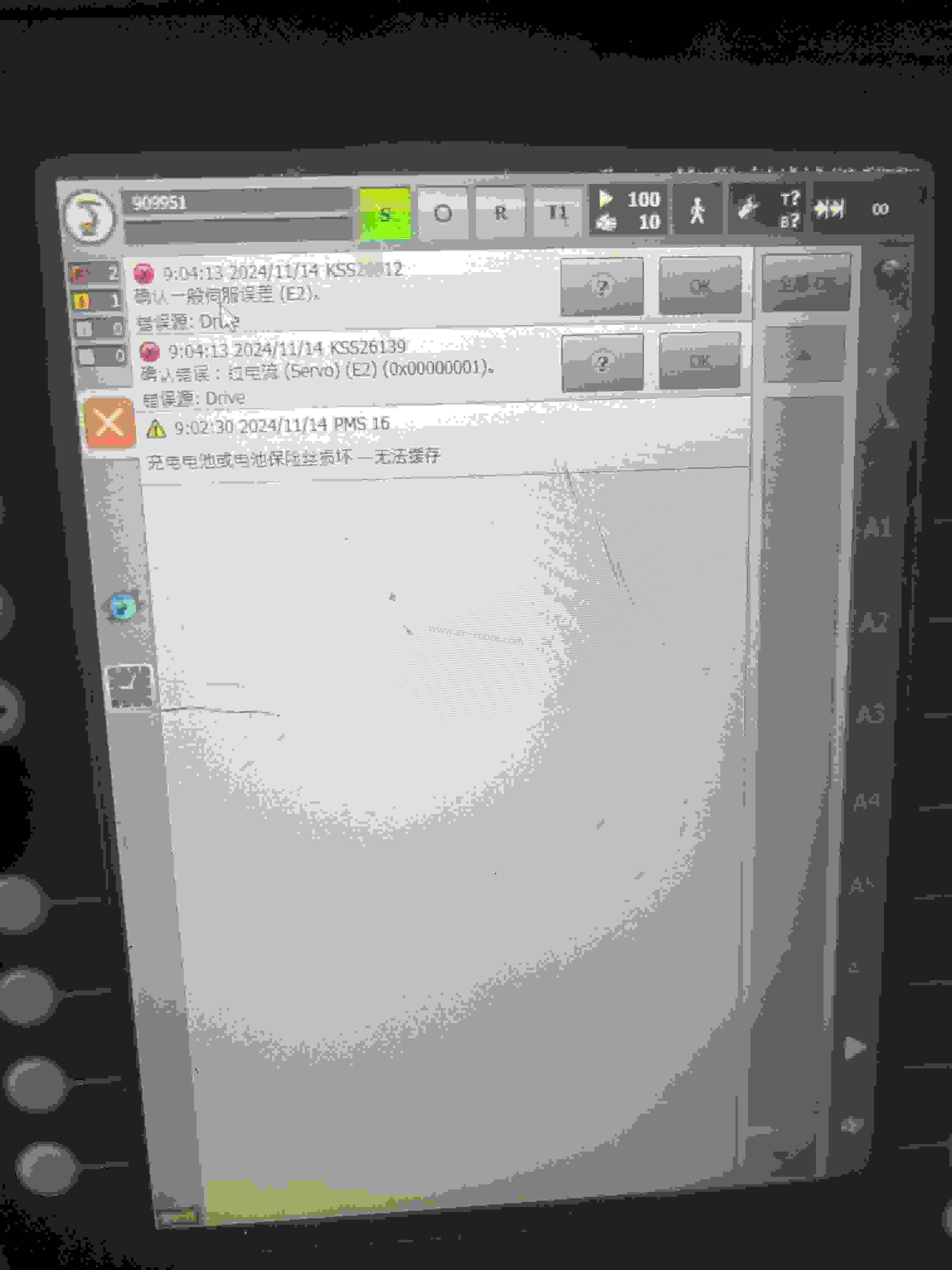
报警代码KSS26012在库卡机器人维修系统中,明确指出存在一般伺服误差。这一错误信号往往与伺服系统的整体运行状态紧密相关,可能源自电机、驱动器、编码器或与之相关联的其他组件的故障。在KUKA机器人的示教器界面上,该错误代码会以特定的图标或文字形式显示出来,提示操作者进行相应的检查与机器人维护。
面对此类报警,首先应细致检查KUKA机器人维修KSP线的连接状况。这包括逐一确认所有连接线的紧固程度,确保它们没有因长时间运行或外力作用而出现松动乃至损坏的情况。紧接着,需对电机和编码器的工作状态进行全面排查。这不仅要观察电机的运行温度是否处于正常范围,还要仔细检测编码器的反馈信号是否准确无误,以判断其是否存在故障。
在检查过程中,一旦发现工业机器人电机、编码器或驱动器存在损坏迹象,应立即考虑更换新部件或寻求专业维修服务,以避免故障进一步升级。同时,电源和电气系统的稳定性也不容忽视。需确保电源供应持续稳定,无电压波动或短路现象,以保障伺服系统的正常运行。
调整控制系统参数也是解决此类问题的重要手段。通过检查和调整伺服系统的PID等关键参数,可以进一步优化系统性能,减少误差的产生。在此基础上,还需对机器人进行系统校准,包括传感器校准、零点校正等步骤,以确保整个系统的准确性和稳定性。
除了上述检查步骤外,还应关注KUKA机器人维修的机械部件是否存在异常。通过检查关节、齿轮、传动系统等关键部件的运转情况,可以及时发现并处理潜在的松动或磨损问题,从而有效避免故障的发生。
库卡机器人维修KSS26012报警代码的出现,可能涉及多种原因。动力制动系统的激活、外部轴连接问题、程序数值溢出、散热器温度过高、电机封死、电流过大、制动故障、电源电压不稳定、超过调节极限以及总线电压充电单元故障等,都是常见的潜在因素。针对这些可能的原因,操作者需逐一进行排查,并根据实际情况采取相应的解决措施。
在机器人故障排除流程中,首先应仔细查看报警信息,明确报警的具体原因。随后,按照硬件连接、传感器和执行器、程序逻辑以及工作环境等步骤逐一进行检查和调整。通过这一系列的操作,可以逐步定位并解决故障,确保库卡机器人能够恢复正常运行。需要注意的是,具体的原因和解决方案可能因KUKA机器人的具体工作环境和工作状态而有所不同,因此在实际操作中需灵活应对。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
