
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > 焊接机器人维修 > 林肯焊机DC-1500电路板故障维修
林肯焊机DC-1500电路板故障维修
林肯焊机DC—1500的故障诊断
1 电路结构特点及基本原理
林肯焊机DC—1500按其功能可分为主电路、操作电路、控制调节系统和保护电路四大部分。
1.1 主电路及操作电路
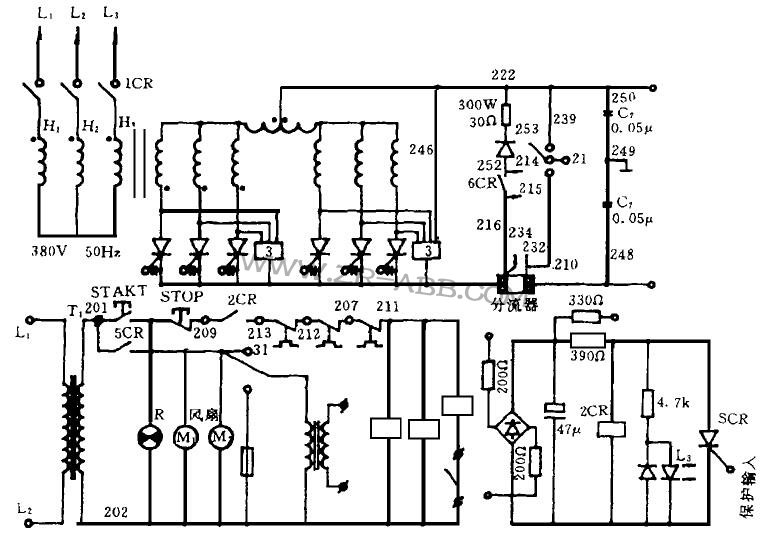
主电路采用带平衡电抗器的双反星形可控硅整流电路,比起三相半波整流和三相桥式整流具有以下特点:
(1)输出电压稳定,脉动小;
(2)消除了整流变压器的直流磁化,变压器二次绕组的利用率高,体积小;
(3)提高了整流元件承受负载的能力,输出电流比三相桥式整流电路增加一倍,适宜于作为低电压、大电流整流,整流效率高;
(4)整流变压器采用不同的连接方式,可用380V或460V两种电压供电。
林肯焊机维修,操作电路采用交流115V电源供电,电路中串接有过流、过热保护接点和远控操作控制接点3CR,近控时将3CR短接,见图1
林肯焊机DC-1500的故障诊断
1.2 控制调节系统
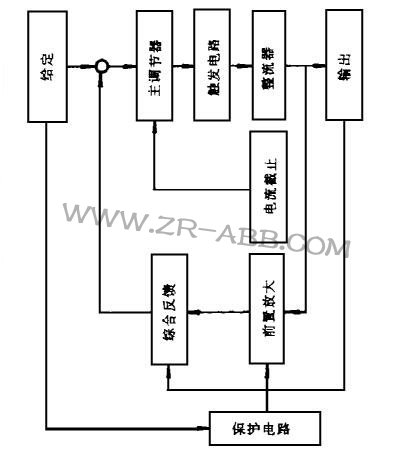
控制调节系统由控制板、触发板和NA—5S操作箱构成。按其功能可分为给定、前置放大、综合反馈、电流截止负反馈、主调节器、触发电路和保护电路七大部分。图2
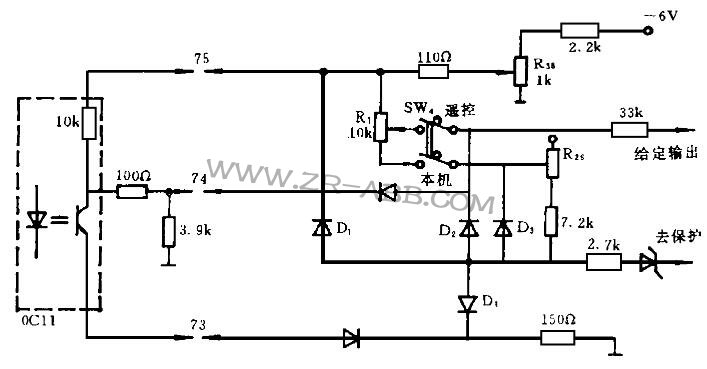
一个可调的输入信号。同时整定焊机的最大和最小输出值。另外,由四个二极管组成的负逻辑或门电路将给定输入电压信号送到保护电路,当给定输入因任一端断线造成电位过低时,保护立即动作,将电源跳开。
1.2.2 主调节器
主调节器是将给定信号和综合反馈信号经差动放大后,产生一个移相控制电压来控制触发脉冲的移相,从而控制了焊机的输出。同时由模拟开关Q6控制,在起弧时使移相控制电压最大,将可控硅导通角推到最小,以减少起弧时的冲击。
1.2.3 综合反馈电路
综合反馈电路包括:电压负反馈、电流负反馈、电压微分负反馈、电流微分负反馈及电流检测与比较电路。其作用是:
(1)稳定焊接输出;
(2)实现焊接特性转换和从起弧到焊接过程的自动切换。
1.2.4 前置放大器
前置放大器的作用是将焊接电流信号经差动放大以后分别送给保护电路、电流截止
图2 焊机系统方框图
负反馈电路和综合反馈电路。
1.2.5 电流截止电路
该电路将前置放大器送来的电流负反馈信号与电流输出整定信号比较后
送到主调
1.2.1 给定电路
给定电路的主要作用是为主调节器提供
