

- ������������˼�������˾
- �������ߣ�020-82000787(8:30-17:30)
- ��ϵ�ֻ���15889988091(�ǹ���ʱ��)
- ������020-82000787
- ���棺020-32887675
- ���䣺gz@zr-robot.com
- �����з�خ�������ֽ�ɽ�ȴ���˽�1��109
- ��ǰλ�ã���ҳ > ��ҵ������ά�� >
-
�KUKA�������Ӿ�ץȡ�Ĺ���ԭ��
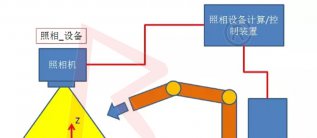
�ؼ���:�,KUKA,������,�Ӿ�,ȡ��,����,ԭ��,��Ҫ,����,����Ҫ���������˵Ĺ켣,��Ϊ���������˱�̹켣�� �Ӿ�ץȡ��Ҫ��ͨ���ı�����˵�TOOL����ϵ��BASE����ϵ��ʵ�ֵġ� ����λ�õı仯��Ҫ����λ�õ�X,Y,Z����ı仯�� BASE����ϵ:�ɸ�����Ҫ�����û�����ϵ�����������䱸�������̨ʱ��ѡ���û�����ϵ��ʹ ... �Ķ�����>>
2020-05-06 -
KUKA������˱��֮�ַ�����������
�ؼ���:KUKA,�,������,���,�ַ���,����,����,����,�����ڳ�����������(�磺C#)�У��ַ�������ֵ�Ƿ��ڵ������ڣ��ַ���������ֵ���Ƿ���˫�����ڡ� ���ڿ������KRL�����У�û�ϸ������ϵ��ַ�����ֻ�л����ַ��������ͣ� �ַ�������ֵ�Ƿ���˫�����ڣ������Ҫ��ʾ��ʾ�ַ�������ʱ����Ҫ�����ַ�������ʵ�� ... �Ķ�����>>
2020-04-29 -

���ǿƻ�����Mate�Ϳ��ƹ��ڲ��������ŷ�������ͼ�ͣ��ļ��
�ؼ���:���ǿ�,������,Mate,����,�ڲ�,����,�ŷ�,����,��ͣ���ǿƻ�����Mate�Ϳ��ƹ��ڲ��������ŷ�������ͼ�ͣ��ļ�飬������˵ֱ����ͼһ�������ɣ� �����ϲ��ӿ�˵���� �����ϲ� �����²� �����ڲ��ṹ �����ڲ��ṹ �ŷ��Ŵ��� Fanuc�ŷ��Ŵ���һ���Ŵ���������6����ķŴ��������ɶȺܸߡ� �ŷ��Ŵ������� �� ... �Ķ�����>>
2020-03-23 -

�KUKA����������������ʽ
�ؼ���:�,KUKA,������,����,����,��ʽ,�,������,�Ĵ���������Ĵ�������ʽ˵�� 1���Զ����з�ʽ ��1���Զ�����˵�� ������˴����Զ�����ʱ����Ҫ���ֶ�״̬ʱ��ѡ����Ҫ���еij���Ȼ��ͨ��Կ�����л������˵��Զ�����״̬�����������ϵ磬Ȼ���������������г����û������ȵ���BCO��ȫ�ο��ģ�Ȼ�� ... �Ķ�����>>
2020-03-23 -

���ǿ�FANUC�����˳���ͣ����ָ����е�ע������
�ؼ���:���ǿ�,FANUC,������,����,ͣ��,�ָ�,�е�,ע������Ŀǰ���и�ҵ������֯����������Ϊ�˰��������з��ǿƻ����˵��豸����ֹͣ�Ŀͻ����ٻָ��������ط������ǿƻ����˻ָ�ʹ��ǰ��ص�ע��������ǿƻ������ڳ����жϵ�Դ���ο���ʹ��ʱ����ȷ���ֳ���������Ͷ����ת��������������������豸�Ĺ��� ... �Ķ�����>>
2020-03-21 -

ZR-YP011������������ϵͳ����Լ����ɱ�
�ؼ���:ZR-YP011,����,����,����ϵͳ,��Լ,�ɱ�,��ͳ,����ͳ��ʽ���ֶ������������̶ȣ�һ���ں��ӹ����У���ʹ���ӵ��������仯��Ҳآ�ı�����ã����ڴ�ͳ��ʽ������ͬһ����Ʒ��آͬ�ĺ����������ӵ���Ҳ��آͬ��Ϊ�˴ﵽ����Ʒ�ʣ�����ȷ���㹻���������������ͳ��ʽ����˺�������������˷ѣ����D����ʹ�� ... �Ķ�����>>
2020-01-09 -

��³˹CLOOS�������ӹ���ά����
�ؼ���:��³˹,CLOOS,����,����,����,ά��,������飺���Ž�������ҵ�����˵ijɱ�Խ��Խ�ͣ��ܶ���ҵ��ʼ����ʹ�ú��ӻ����˽��к��ӣ��ں��ӻ����˽�������Ͷ�ǿ�ȡ���������Ч�ʵȷ����ܺ����õ�����£����ӻ�����Ҳ���ٹ����г���һ�������⣬��Ҫ�ֳ��Ĺ���ʦ������⣬�ɼ�����ʦ����ҵ��ô�� ... �Ķ�����>>
2020-01-08 -
��³˹�������ӵ绡����ά��
�ؼ���:��³˹,����,����,�绡,����,ά����飺��ͳ��MIG���� ����������ϵ���Ҫ���Ӽ�����MAG���ӹ��գ�ȫ�Զ��Ͱ��Զ�MAG������Ҫ���õ�������绡���ӣ����ֺ������������в��ʣ�����û���κ����ơ���Щ�����ǵ�̼�ֺߺϽ�֡����Ͻ�֣���п�ְ��ǥ������ ����绡��ԭ�������ֵ绡�� ... �Ķ�����>>
2020-01-07 -

CLOOS��³˹�������Ӻ�˿����ά��
�ؼ���:CLOOS,��³˹,����,����,��˿,����,ά����飺1�����ں��ӵĺ�˿��������ڵ�̼�ֵĶ�����Ӷ��ԣ�����Ժ��ӵIJ����������ߺ��ӵ�����û�������Ҫ��ҩо��˿ͬ����Ӧ���ڻ����˵�Ӧ�ã���ͨ������£���ʹ���������͵ĺ�˿������ʵо��˿�����ͣ�������ߵĺ����ٶ�����ߵ��۷������ϣ� ... �Ķ�����>>
2020-01-04 -
CLOOS��³˹����GLW 500�������ֹ�������ά��
�ؼ���:CLOOS,��³˹,����,����,����,����,ά����飺������������ҪӦ���ڸ��������㲿���ĺ����������ڸ������ʴ���������ҵ������������ҵ��Ҫ�������װ����Ӧ���ṩ��Ԫ��ƷΪ��������˾��Ҫ���»��������˳���װ�������������ݸ�����Ŀ�IJ�ͬ����������������װ���еĻ����˵�Ԫ��Ʒ�� ... �Ķ�����>>
2020-01-03 -

KUKA������˱�����log����(��־)
�ؼ���:KUKA,�,������,���,���,log,����,��־,�������潲����ν�һЩ����log���������Ի��ڻ����˱�����CWRITEָ����ʵ�ִ˹��ܣ� (1).Log�ļ��Զ���ʱ�������� (2).ÿ��10��logһ�Σ� (3).ÿ����Ϣ����һ�У� ����ʵ�ֹ������£� 1.��SmartPad�ϴ���һ��xxx.src,���£� DEFWrite_File() DECLINThandle DECL ... �Ķ�����>>
2020-01-03 -
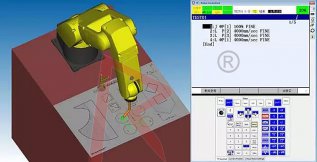
FANUC���ǿƻ�����λ����Ϣ�����
�ؼ���:FANUC,���ǿ�,������,λ��,��Ϣ,��,���,��,λ��λ����Ϣ�������£� ��ѡ�����ĵij��� ʾ�̺д���ON״̬ ��λ����Ϣ���������ַ����� 1.ʾ���ķ� 2.ֱ�����뷨 ����һ��ʾ���ķ� 1)�ƶ���굽������λ�õĶ���ָ����кŴ��� 2)ʾ�̻����˵���λ�ã� 3)����SHIFT��+F5�������������ɼ�¼��λ�� ... �Ķ�����>>
2020-01-02
