
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > 库卡KUKA机器人 > 库卡KUKA机器人视觉抓取的工作原理
库卡KUKA机器人视觉抓取的工作原理
时间:2020-05-06 点击: 来源:互联网 作者:匿名
简介:首先要建立机器人的轨迹,作为基础机器人编程轨迹。 视觉抓取主要是通过改变机器人的TOOL坐标系或BASE坐标系来实现的。 物体位置的变化主要是它位置的X,Y,Z方向的变化。 BASE坐标系:可根据需要定义用户坐标系。当机器人配备多个工作台时,选择用户坐标系可使……
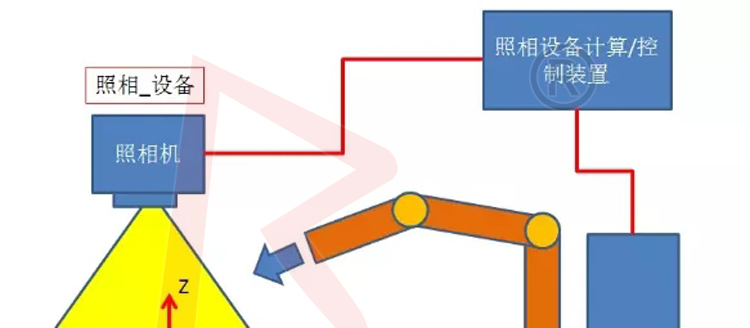
首先要建立机器人的轨迹,作为基础机器人编程轨迹。
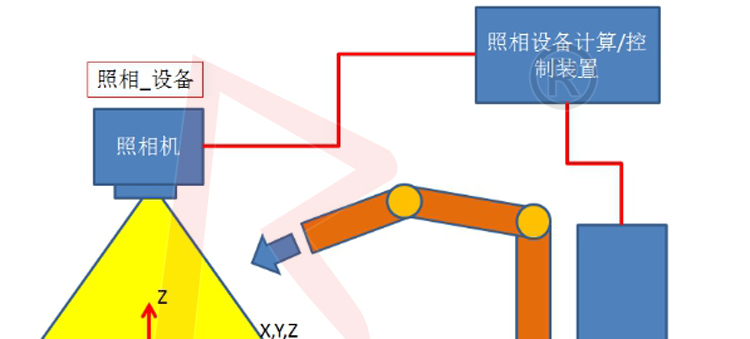
视觉抓取主要是通过改变机器人的TOOL坐标系或BASE坐标系来实现的。
物体位置的变化主要是它位置的X,Y,Z方向的变化。
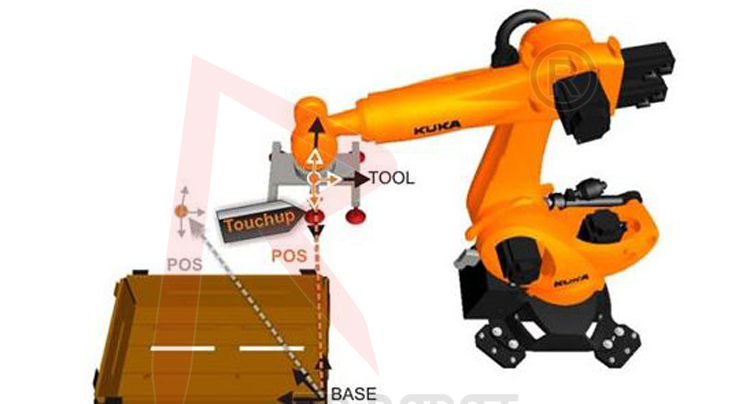
BASE坐标系:可根据需要定义用户坐标系。当机器人配备多个工作台时,选择用户坐标系可使操作更为简单。在用户坐标系中,TCP点将沿用户自定义的坐标轴方向运动。
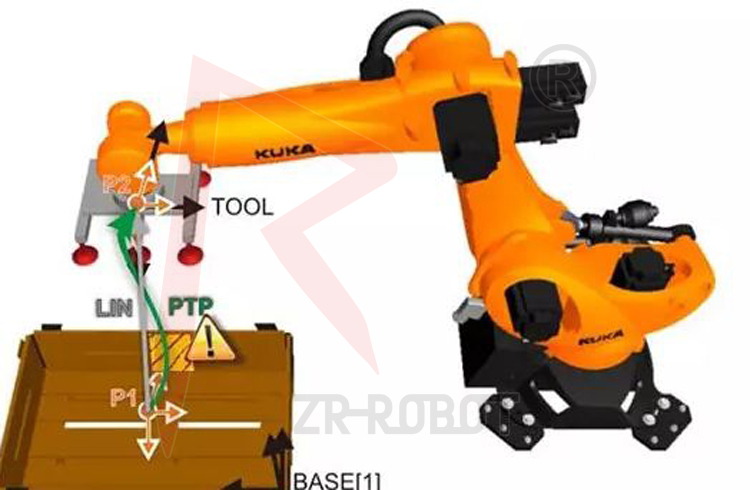
以改变BASE坐标系为例:
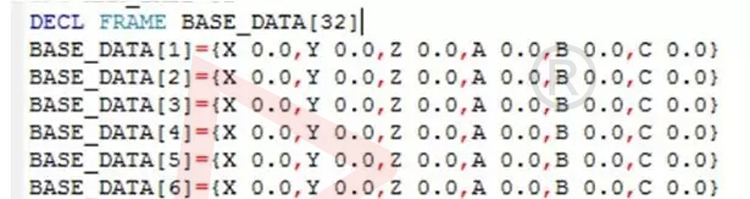
库卡C4现在可以使用32个BASE坐标系
没有使用视觉补偿功能时,只用一个BASE坐标系

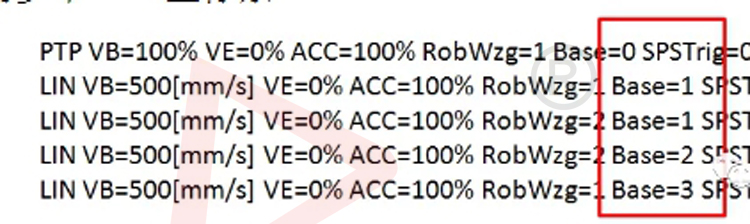
改变机器人BASE坐标系值从而改变机器人抓件位置,使用多个坐标系

制作一个后台程序,用来改变BASE
设置输入变量点的接收变量:
SIGNALgxe_1$in[2278]TO$in[2285]
SIGNALgxe_2$in[2286]TO$in[2301]
SIGNALgxe_3$in[2302]TO$in[2309]
SIGNALgxe_4$in[2310]TO$in[2325]
SIGNALgxe_5$in[2334]TO$in[2341]
SIGNALgxe_6$in[2342]TO$in[2357]
设置坐标变量用于改变BASE坐标值
DECLFRAMEGet_Val_Pos={X0.0,Y0.0,Z0.0,A0.0,B0.0,C0.0};
DECLFRAMEGet_Val_Pos1={X0.0,Y-46.2999992,Z0.0,A0.0,B0.0,C0.0};
DECLFRAMEGet_Val_Pos2={X0.0,Y-17.8699989,Z0.0,A0.0,B0.0,C0.0};
使多个BASE[]坐标系保持一致
base_Data[1]=$base
base_Data[2]=base_data[1]
base_Data[3]=base_data[1]
base_Data[4]=base_data[1]
变量的初始化归0,get_val_pos=$nullframe
例如:现在只改变BASE的Y方向位置
get_val_pos.y=gxe_2*0.01换算坐标值,存到坐标的Y方向
base_data[1]=$base:Get_Val_Pos改变BASE坐标系的Y方向位置
使用多个BASE坐标系:
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
下一篇:kuka库卡机器人外部轴配置步骤
工业机器人维修相关阅读:
扫二维码手机浏览
