
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

机器人系统集成商如何发展壮大? 【图】
关键词:机器人,系统,集成商,如何,发展,壮大,工业,4.0,浪潮,在工业4.0的浪潮下,近几年国内涌现出一批机器人维修系统集成行业的佼佼者,但是机器人系统集成商作为中国机器人市场上的主力军,却普遍规模较小,年产值不高,面临强大的竞争压力。 机器人本体是机器人产业发展的基础,而下游系统集成则是机器人商业化、大规... 阅读更多>>
2016-12-13 -

ABB焊接机器人系统故障 【图】
关键词:ABB,焊接,机器人,系统,故障,发生,撞枪,可能,由于,工(1)发生撞枪。可能是由于工件组装发生偏差或ABB焊接机器人焊枪的TCP不准确,可检查装配情况或修正焊枪TCP。 (2)出现ABB焊接机器人电弧故障,不能引... 阅读更多>>
2016-12-13 -

ABB码垛机器人的真空夹具系统 【图】
关键词:ABB,码垛,机器,人的,真空,夹具,系统,德国,费森,尤斯德国费森尤斯卡比医药有限公司需要码垛的垛型为每个货盘码垛5层,每层码垛9个满载的纸箱,每个装满输液袋的纸箱重8公斤。这样,480个纸箱共需要10.6个托盘盛载,满载的货盘再ABB通过传送带从装载站传送出去。也就是说,每小时必须供给11个货盘至码垛工位,才... 阅读更多>>
2016-12-09 -
安川机器人示教器常见故障: 【图】
关键词:安川,机器人,示教,常见,故障,安川,示教,系统,软件,故障1、安川示教器系统软件故障 2、安川示教盒无法进入系统故障3、安川示教编程器无法启动 4、安川示教器电路板短路5、安川示教器急停按键失效或不灵(更换急停按键) 6、安川机器人示教器触摸不良或局部不灵?(更换触摸面板) 7、安川控制面板液晶屏摔坏 8、安... 阅读更多>>
2016-12-07 -

ABB机器人系统备份与冷启动 【图】
关键词:ABB,机器人,系统,备份,启动,系统,备份,应用软件,完整一、系统备份: 系统应用软件的不完整将使机器人发生故障后的恢复十分困难!一定要按以下步骤做好系统备份。 进入服务窗口: 其他窗口---System Parameters---回车 系统备份: 菜单键File---3Backup---回车---功能键Unit选择存储单元---功能键NewDir建立存储... 阅读更多>>
2016-12-07 -

ABB机器人安全操作规则 【图】
关键词:ABB,机器人,安全,操作,规则,由于,ABB,机器人,系统由于ABB机器人系统复杂而且危险性大,在练习期间,对ABB机器人进行任何操作都必须注意安全。无论什么时候进入ABB机器人工作范围都可能导致严重的伤害,只有经过培训认证的人员才可以进入该区域。 以下的安全守则必须遵守: 万一发生火灾,请使用二氧化碳灭火... 阅读更多>>
2016-12-05 -
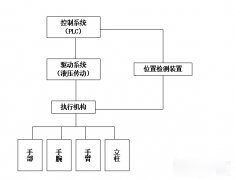
机械手的系统工作原理及组成介绍 【图】
关键词:机械手,系统,工作,原理,组成,介绍,现今,生活,科技,新月在现今生活中,科技日新月益的进展之下,机械手臂与有人类的手臂最大区别就在于灵活度与耐力度。也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累!机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生... 阅读更多>>
2016-12-03 -
工业机器人示教器编程系统状态控制指令 【图】
关键词:工业,机器人,示教,编程,系统,状态,控制,指令,CALIBCALIB指令:此指令校准关节工业机器人位置传感器。 STATUS指令:用来显示用户程序的状态。 FREE指令:用来显示当前未使用的存储容量。 ENABL指令:用于开、关系统硬件。 ZERO指令:此指令的功能是清除全部用户程序和定义的位置,重新初始化机器人示教器。 DO... 阅读更多>>
2016-12-02 -

伺服电机与步进电机的区别 【图】
关键词:伺服,电机,步进,区别,定位,系统,最常,用的,电机,不外乎在定位系统中 , 最常用的电机不外乎是步进电机和伺服电机 , 其中 , 步进电机主要可分为 2相、5相、微步进系统 , 伺服电机则主要分为 DC伺服和AC伺服两种 . 2相、5相和微步进系统主要是驱动器所表现出来解析度不同 , 2相步进系统电机每转最细可分为 400 格 ,... 阅读更多>>
2016-11-30 -
工业机器人示教盒系统的设计 【图】
关键词:工业,机器人,示教盒,系统,设计,示教盒,机器人,控制系统,示教盒是机器人控制系统的重要组成部分,操作者通过示教盒进行手动示教,控制机器人达到不同位姿,并记录各个位姿点坐标。利用机器人语言进行在线编程,实现程序回放,让机器人执行程序要求的轨迹运动。本文利用单片机技术设计并实现了工业机器人的示教盒示... 阅读更多>>
2016-11-28 -
-
