
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

怎么进行喷涂机器人线性单元的配置 【图】
关键词:怎么,进行,喷涂,机器人,线性,单元,配置,喷涂,机器人,线喷涂机器人线性单元的配置可以参考以下步骤: 选择合适的喷涂机器人:喷涂机器人应具有高精度、高速度、高灵活性等特点,以适应各种复杂的喷涂需求。 确定线性单元的规格和尺寸:根据喷涂机器人的工作范围和喷涂需求,确定线性单元的规格和尺寸,以确保喷涂... 阅读更多>>
2023-12-09 -

kuka库卡机器人外部轴配置步骤 【图】
关键词:kuka,库卡,机器人,外部,配置,步骤,第一步,电脑,改成第一步,将电脑IP更改成 或者同一IP段内即可。 第二步,将网线用电脑和机器人连接 第三步,打开Workvisual软件(以下简称WV软件) 软件打开后入下图1所示: 图1,WV软件打开界面 在WV软件的窗口中如图2所示 图2项目文件选择 当选择Browse时,界面如图3所示 图3... 阅读更多>>
2020-05-27 -
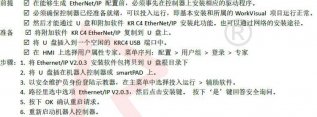
KUAK库卡机器人配置与基恩士PLC以EIP通讯 【图】
关键词:KUAK,库卡,机器人,配置,基恩,PLC,EIP,通讯,硬一.硬件: 1 机器人 库卡 KR30 HA 高精度机器人 2 PLC 基恩士 PLC 型号: KV7500 3 通讯方式 二者通过Ethernet/IP协议进行通讯:PLC作为Scanner,机器人作Adapter 二.软件: 序号 软件名 版本 1 库卡控制系统-KSS KSS8.3.36 2 库卡工程软件-Workvisual 4.0.29... 阅读更多>>
2020-03-18 -

MiR推出可最高负载1吨的全新产品MiR1000 配置业界首款基于AI的导航技术 【图】
关键词:推出,最高,负载,新产品,MiR1000,配置,业界,首款,2019年4月8日,MiR自主移动机器人推出全新MiR1000产品,是迄今行业最大负载的自主移动机器人(AMR)翘楚。正如本周在Automate 2019 Show and Conference上的展示,MiR1000可在动态环境中自动拾... 阅读更多>>
2020-05-20 -
发那科FANUC机器人KAREL程序的配置详解 【图】
关键词:发那科,FANUC,机器人,KAREL,程序,配置,详解,KKAREL程序支持功能的添加 之前都是使用ShiftFWD的方式执行手动执行PC程序,但如果想实现类似于TP程序后台逻辑一样的功能,则需要使用KAREL程序支持功能。使用KAREL程序支持功能,需要添加额外的软件包J971,即KARELUseSprtFCTN这个功能选项包,只有当添加了... 阅读更多>>
2019-12-30 -

KUKA库卡工业机器人外部轴配置方法 【图】
关键词:KUKA,库卡,工业,机器人,外部,配置,方法,连接,控制,1、连接控制柜和外部轴的动力线和编码器线 (外部轴动力线) (连接机器人底部RDC编码器线) 2、Workvisual外部轴添加与配置 (1)根据机器人控制柜内部实际的KPP和KSP型号添加: (右键控制系统组件添加) (2)确认电机铭牌上的电机型号: (开头MG/ME光轴... 阅读更多>>
2019-12-26 -
库卡KUKA机器人外部IO选择程序启动配置 【图】
关键词:库卡,KUKA,机器人,外部,选择,程序,启动,配置,库卡,一、库卡机器人启动方式了解 1、手动连续启动方式 (1)说明 在手动操纵模式下,手动选择要运行的程序,然后手动上电和手动运行程序的基本操作。 (2)大致操作步骤 A:编写程序和调试记录好点位等,然后手动模式下选定要运行的程序,选定程序后机器人状态栏... 阅读更多>>
2019-12-25 -

KUKA库卡机器人KRC4配置 Beckhoff I/O模块 【图】
关键词:KUKA,库卡,机器人,KRC4,配置,Beckhoff,模EtherCAT是EtherCATTechnologyGroup公司一种以以太网为基础的开放式 现场总线系统。 KRC4配置EtherCAT输入输出模块 一、硬件Hardware 二、软件Software 三、硬件连接Connection 参照电气图纸将硬件连接。 四、WorkVisual配置Configration 1.导入设备描述文件... 阅读更多>>
2019-12-24 -

库卡kuka机器人外部轴配置步骤详解 【图】
关键词:库卡,kuka,机器人,外部,配置,步骤,详解,第一步,电脑第一步,将电脑IP更改成 或者同一IP段内即可。 第二步,将网线用电脑和机器人连接 第三步,打开Workvisual软件(以下简称WV软件) 软件打开后入下图1所示: 图1,WV软件打开界面 在WV软件的窗口中如图2所示 图2项目文件选择 当选择Browse时,界面如图3所示 图3... 阅读更多>>
2019-12-19 -

怎么进行库卡机器人线性单元的配置 【图】
关键词:怎么,进行,库卡,机器人,线性,单元,配置,KUKAKL-1KUKAKL-100线性滑轨 KUKA线性滑轨KL100是一个安装在地面、天花板或墙壁上的独立单轴线性滑轨。在搬运、装卸、塑料加工、检测或检验等领域应用非常广泛。 KL100作为机器人的附加轴运行,适用于KRAGILUS系列的所有机器人。由此,控制就由相应的机器人控制器负... 阅读更多>>
2019-12-14 -

库卡KUKA机器人外部自动运行模式的过程和配置 【图】
关键词:库卡,KUKA,机器人,外部,自动,运行,模式,过程,配置,配置并采用外部自动运行 1.通过外部自动运行接口可用上级控制器(例如用一个PLC)来控制机器人进程 2.上级控制系统通过外部自动运行接口向机器人控制系统发出机器人进程的相关信号 (如运行许可、故障确认、程序启动等)。机器人控制系统向上级控制系统发送... 阅读更多>>
2019-12-02
