
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

ABB IRC5机器人设置输出、读取输入和配置 I/O 单元所需的主要步骤 【图】
关键词:ABB,IRC5,机器人,设置,输出,读取,输入,配置,单元使用输入和输出 本步骤详细介绍了机器人维修设置输出、读取输入和配置 I/O 单元所需的主要步骤。 操作 1. 您可能需要创建新的 I/O。 2. 使用任何输入或输出之前,必须将系统配置为启用I/O 功能。 3. 您可以为特定的 数字输出 设值。 4. 您可以为特定的 模拟... 阅读更多>>
2017-05-06 -
ABB IRC5机器人如何使用现有的RAPID 程序 【图】
关键词:ABB,IRC5,机器人,如何,使用,有的,RAPID,程序运行程序 此步骤规定了如何使用现有的RAPID 程序。 操作 .1 加载现有程序。 .2 启动程序执行时,您可以选择运行一次机器人保养程序或连续运行程序。 .3 如果程序已加载,您可以启动程序执行。 .4 程序执行完成后,程序可能会停止运行。... 阅读更多>>
2017-05-06 -
ABB IRC5机器人创建、保存、编辑和调试任何 RAPID 程序时需要执行的步骤 【图】
关键词:ABB,IRC5,机器人,创建,保存,编辑,调试,任何,RA使用 RAPID 程序 本步骤详细介绍了在创建、保存、编辑和调试任何 RAPID 程序时需要执行的步骤。 请注意,除本步骤机器人维修 中介绍的信息外,您还可以参阅更多信息。有关 RAPID 程序的概念,请参阅RAPID 应用程序的结构 操作 1. 从创建 RAPID 程序开始 2.... 阅读更多>>
2017-05-06 -
操纵ABB IRC5机器人所需的主要步骤 【图】
关键词:操纵,ABB,IRC5,机器人,所需,主要,步骤,微动,控制微动控制 本步骤详细介绍操纵ABB IRC5机器人所需的主要步骤。 操作 1. 在以下条件下可对ABB IRC5机器人进行微动控制机器人维修 : a 系统已按本手册启动。 b 未执行设定的操作 c 系统处于手动模式。 d 使动装置已按下,系统处于 电机开启 状态。 2. 许多与控... 阅读更多>>
2017-05-06 -
ABB IRC5机器人首次启动系统时的所有必要步骤 【图】
关键词:ABB,IRC5,机器人,首次,启动,系统,所有,必要,步骤启动前提条件 本步骤详细介绍在系统关机的情况下启动系统所需的主要步骤。所有信息均假设有效系统软件已安装在ABB IRC5机器人控制器上,并且这是系统出厂后的首次启动。 系统启动 此步骤详细介绍首次启动系统时的所有机器人驱动器必要步骤。日常启动过程通常... 阅读更多>>
2017-05-06 -
ABB IRC5机器人设置网络连接步骤 【图】
关键词:ABB,IRC5,机器人,设置,网络,连接,步骤,设置,网络设置网络连接 无论采用什么方式设置网络连接,开始几个步骤都是相同的: 操作步骤 1. 执行 X- 启动进入引导应用程序。 2. 在引导应用程序中,点击设置。显示网络连接对话框。 3. 如果选择不使用 IP 地址,请点击不机器人驱动器使用IP 地址。否则,继续执行以... 阅读更多>>
2017-05-05 -
ABB IRC5怎么将 PC 机连接到服务端口? 【图】
关键词:ABB,IRC5,怎么,接到,服务,端口,接到,服务,端口,将 PC 机连接到服务端口 附注 如本步骤所述,服务端口只能用于直接连接 PC 机。不要机器人驱动器将其连接到 LAN (局域网),因为 DHCP 服务器会对连接至 LAN 的所有单元自动分配 IP 地址。详情请联系您的网络管理员。 注意 如果电缆与控制模块机器人驱动器... 阅读更多>>
2017-05-05 -
ABB IRC5机器人断开 FlexPendant的步骤 【图】
关键词:ABB,IRC5,机器人,断开,FlexPendant,步骤断开 FlexPendant 以下是断开FlexPendant 的详细步骤 步骤 操作 1. 完成所有需要连接 FlexPendant 的当前活动。(例如路径调整、校准、修改程序。) 2. 关闭系统。如果在没有关闭系统时断开机器人驱动器 FlexPendant,系统会进入紧急停止状态。 3. 逆时针拧... 阅读更多>>
2017-05-05 -
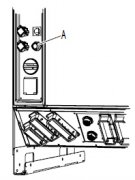
ABB IRC5机器人连接FlexPendant操作步骤 【图】
关键词:ABB,IRC5,机器人,连接,FlexPendant,操作FlexPendant 连接器位置 FlexPendant 连接器的位置如下图所示 位置说明 A FlexPendant 连接器 连接 FlexPendant 操作步骤 1. 在控制器上找到 FlexPendant 插座连接器。 下图显示了单机器人驱动器个机柜控制器上的操作员面板 2. 插入 FlexPendant 电缆连接器... 阅读更多>>
2017-05-07 -
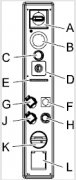
ABB IRC5如何连接 FlexPendant? 【图】
关键词:ABB,IRC5,如何,连接,FlexPendant,操作步操作步骤 1. 在控制器上找到 FlexPendant 插座连接器。 下图显示了单个机柜控制器上机器人驱动器的操作员面板。 H:FlexPendant 连接器 (A22.X1) 2. 插入 FlexPendant 电缆连接器。 3. 顺时针旋转连接器的锁环,将其拧紧。... 阅读更多>>
2017-05-05 -
ABB IRC5机器人为什么要处理过程干扰? 【图】
关键词:ABB,IRC5,机器人,为什么,处理,过程,干扰,处理,过处理过程干扰 过程干扰不仅会影响特定的机器人单元,而且会影响整个系统链,即使问题起因于 某个特定单元。 事件链可能会导致操作单个机器人单元时机器人驱动器无法获知危险操作,因此须特别注意这种干扰。执行所有补救措施的人员必须熟知整个生产线,而不仅... 阅读更多>>
2017-05-05 -
ABB IRC5机器人手动减速模式和手动全速模式下的安全性 【图】
关键词:ABB,IRC5,机器人,手动,减速,模式,全速,安全性,手手动模式简介 手动模式常用于创建程序和调试ABB IRC5机器人系统。 手动模式分以下两种: 1、 手动减速模式,通常也称为手动模式 2、 手动全速模式(只限部分市场) 在手动模式下,您需要按下使动装置以启动ABB IRC5机器人电机。 什么是手动全速模式? 在手动... 阅读更多>>
2017-05-05
