
- ������������˼�������˾
- �������ߣ�020-82000787(8:30-17:30)
- ��ϵ�ֻ���15889988091(�ǹ���ʱ��)
- ������020-82000787
- ���棺020-32887675
- ���䣺gz@zr-robot.com
- �����з�خ�������ֽ�ɽ�ȴ���˽�1��109
- ��ǰλ�ã�TAG
-

��ô������FANUC������ʾ���ٶȣ� ��ͼ��
�ؼ���:��ô��,����,FANUC,������,ʾ��,�ٶ�,�ϵ�,FANU�� TP �ϵ�FANUC������ ʾ�� �ٶȼ��������á� ʾ���ٶȼ� VFINE? FINE? 1%? 5%? 50%? 100%VFINE ��5%֮�䣬ÿ��һ�£��ı�1%5%��100%֮�䣬ÿ��һ�£��ı�5% SHIFT��+ʾ���ٶ� VFINE? FINE? 1%? 5%? 50%? 100% ע�⣺��ʼ��ʱ��FANUC������ʾ���ٶȾ�����... �Ķ�����>>
2017-03-16 -
FANUC���ȥ����Home �㣿 ��ͼ��
�ؼ���:FANUC,��ȥ,����,Home,Home,һ��,��ȫ,λ��Home ����һ����ȫλ�ã�FANUC����������һ��ʱ��Զ�빤�����ܱߵĻ��������ǿ�������Home �㣬��FANUC��������Home ��ʱ����ͬʱ�����źŸ�����Զ�˿����豸��PLC�������ݴ��źţ�PLC �����ж�FANUC�������Ƿ��ڹ���ԭ�㡣... �Ķ�����>>
2017-03-16 -
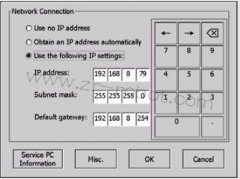
ABB�����������������Ӧ�ó������� IP �����磿 ��ͼ��
�ؼ���:ABB,������,���,����,����,Ӧ�ó���,����,����,ABABB����������Ӧ�ó������ð��� IP ���������á� ������ 1. ִ�� X- ������������Ӧ�ó��� 2. ������Ӧ�ó����У����Settings�� 3. ������Ӧ��ѡ�� 1��Use no IP address 2��Obtain IP address automatically 3��Use the following settings ʹ�����ּ���... �Ķ�����>>
2017-03-19 -

ABB�����˹���������ϵ������ ��ͼ��
�ؼ���:ABB,������,����,����ϵ,����,ABB,������,����,��ABB�����˹�������ͼʾ Ҫ�鿴����Ŀ��ù����������������ð�ť�� ��Щ�����������ƴ�����Ҳ���ã������ѡ�ߡ���������Ч�غ� ��129 ҳ �� ѡ��Ҫʹ�õ�ABB�����˹����� ABB����������ϵ����ͼʾ �ɲ鿴���������ϵ���ܣ��������ϵ���ð�ť�� ��... �Ķ�����>>
2017-03-17 -

ABB�����˶���ģʽ������ ��ͼ��
�ؼ���:ABB,������,����,ģʽ,����,����,ģʽ,����,ͼʾ,������ģʽ����ͼʾ Ҫ�鿴�����ABB�����˶���ģʽ���ܣ���������ģʽ���ð�ť�� ��Щ������������ ������Ҳ���ã������ѡ����ģʽ ��128 ҳ �� ѡ����ģʽ���ã� 1���� 1-3 2���� 4-6 3�� ���� 4���ض���... �Ķ�����>>
2017-03-15 -

ABB�����ˣ� �������ã� �˵���е��Ԫ������ã� ��ͼ��
�ؼ���:ABB,������,����,����,�˵�,��е,��Ԫ,���,ABB,ABB�����˻�е��Ԫ��ťͼʾ �� �������÷��ص�����Ļ�� A����е��Ԫ�˵���ť B����е��Ԫ����ͻ����ʾѡ�еĵ�Ԫ����μ�ѡ��ABB�����˻�е��Ԫ���������� ��126 ҳ �� C���й��˶�ģʽ���ã���ǰѡ���� 1-3 �˶�ģʽ�����������õ�˵��������Ķ���ģ ʽ... �Ķ�����>>
2017-03-12 -
��������Զ�����ABB�����������ƵĻ�е��Ԫ�� ��ͼ��
�ؼ���:���,����,�Զ�,����,ABB,������,��,����,��е,������Զ����е��Ԫ�Ͷ����������װ��Multitasking����ABB�����˳���༭������֮���л�ʱ����Ӱ�������ƵĻ�е��Ԫѡ�� ����ζ���ڽ���������ʱ�����ʹ�õĻ�е��Ԫ���ƶ�������һ�����ڻ��ABB�����˳���༭����ʹ�õ��Ǹ���е��Ԫ�������ÿ�... �Ķ�����>>
2017-03-10 -
�������ABB�������������ȡ��������� I/O ��Ԫ ��ͼ��
�ؼ���:���,����,ABB,������,���,��ȡ,����,����,��Ԫ,���������裺 1. �����Դ����µ� I/O�� 2. ʹ���κ���������֮ǰ�����뽫ϵͳ����Ϊ����I/O ���ܡ���ϵͳ�����ڴ���ϵͳʱ��ɡ� �й����ִ�д˲��������飬����IJ���Ա�ֲ� -RobotStudio���� 3. ������Ϊ�ض��������������ֵ�� 4. ������Ϊ�ض���ģ����... �Ķ�����>>
2017-03-09 -
ABB���������ȥ�����������ӣ� ��ͼ��
�ؼ���:ABB,����,����,��ȥ,����,����,����,��ʱ,��Ҫ,����һ����ʱ��Ҫ�����������ӣ� ��ABB�����˿������״����ӵ����������Ѱַ�������ʱ������Ҫ����ABB�����˿��������������ӡ� ���������� ����Զ���ȡIP ��ַ��һ��Ҫȷ��Ϊ�����ṩIP ��ַ�ķ������������У����� ���� ����������ͨ��ABB�����˿���... �Ķ�����>>
2017-03-07 -
ABB��������������������ӣ� ��ͼ��
�ؼ���:ABB,������,���,����,����,����,����,����,ʲô,�����۲���ʲô��ʽ�����������ӣ���ʼ�������趼����ͬ�IJ��裺 �������裺 1. ִ�� X- ������������Ӧ�ó��� 2. ������Ӧ�ó����У�������á���ʾ�������ӶԻ��� 3. ���ѡ��ʹ�� IP ��ַ��������ʹ��IP ��ַ��������ִ�����²��裡����������... �Ķ�����>>
2017-03-04 -
KUKA����ϵͳ�����ȥ���á�ǯָ��� ��ͼ��
�ؼ���:KUKA,����ϵͳ,����,��ȥ,����,ǯָ��,ָ��,ͨ��,��ǯ��ǯָ� ͨ������������ִ��ǯ������ָ�����ܡ� �˹��������еľ䷨Ϊ������ ѡ��KUKA����������ǯ���������µ�InLine���� ���� ���������25�]���źţ������Ă�Ϊ��0���� FALSE�������������26���źţ���ȡ����1���� TRUE����ʱ��ǯ1... �Ķ�����>>
2017-02-27 -
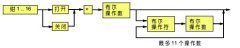
KUKA���������õ��ٶȳ����˹涨�ķ�Χ ��ͼ��
�ؼ���:KUKA,������,����,�ٶ�,����,����,��Χ,��ʾ,����,��ʾ���֣����õ��ٶȳ����˴�Ӧ�Ĺ�ģ����š� ���أ�KUKA���������õ��ٶȳ����˴�Ӧ�Ĺ�ģ�����磺��ֱ������ʽ���ƶ�ͨ���� ���ʱ�֡� ��ѯ����̬ Ӱ�죺 1.ת�ٵ����źš� 2.����� $ALARM_STOPO �źš� 3. ���һ�м����ָ� Ӧ���취�� 1.�½���... �Ķ�����>>
2017-02-22
