
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

要修改动作监控的设置ABB机器人如何操作? 【图】
关键词:修改,动作,监控,设置,ABB,机器人,如何,操作,编辑,动编辑动作监控设置 本节介绍如何修改动作监控的设置。 1. 在 ABB 菜单选择动作设置的任务。 控制面板 或 监控来应用或取消路径监控。 2. 点击任务列表,然后选择一个任务。 3. 点击关闭/开启即可删除或启用路径监控。机器人驱动器点击 -/+ 调节灵敏度。 注:... 阅读更多>>
2017-04-19 -
要修改动作监控的设置ABB机器人如何操作? 【图】
关键词:修改,动作,监控,设置,ABB,机器人,如何,操作,编辑,动编辑动作监控设置 本节介绍如何修改动作监控的设置。 1. 在 ABB 菜单选择动作设置的任务。 控制面板 或 监控来应用或取消路径监控。 2. 点击任务列表,然后选择一个任务。 3. 点击关闭/开启即可删除或启用路径监控。机器人驱动器点击 -/+ 调节灵敏度。 注:... 阅读更多>>
2017-04-19 -
添加一个新的有效载荷并设置数据声明在ABB机器人系统中如何操作? 【图】
关键词:添加,一个,新的,有效,载荷,设置,数据,声明,ABB,机器创建有效载荷时会发生什么情况?机器人保养 程序将建立一个 loaddata 类型的变量。 变量的名称就是有效载荷的名称。 添加一个新的有效载荷并设置数据声明 有效载荷坐标(包括方向)应该建立在大地坐标系上。 操作 1 在 ABB ,创建一个新的有效载荷。输入数据... 阅读更多>>
2017-04-01 -
KUKA机器人如何设置屏幕保护? 【图】
关键词:KUKA,机器人,如何,设置,屏幕保护,确保,显示,状态,窗确保显示在状态窗口的NUM不在有效状态,使用字母数字键盘的控制功能 在Windows开始菜单里,KUKA屏幕保护功能必须是有效的。有同时按下CTRL和ESC键,打开开始菜单 使用和键选择Settings菜单 由按Enter键或键打开子菜单 现在按Enter键打开Control Panel窗口 你... 阅读更多>>
2017-04-02 -

KUKA机器人安装操作系统中怎么设置现有分区? 【图】
关键词:KUKA,机器人,安装,操作系统,怎么,设置,现有,分区,KKUKA机器人操作系统装载时现有分区决定主分区。 如果没有设置现有分区,系统不能从硬盘装载。选择定义现有分区,输入数字1。按回车键确认选择 选择的当前分区在状态下字母A显示 按ESC键两次编辑分区程序。 硬盘分区必须在格式化后才能装载数据到硬盘上。 KUK... 阅读更多>>
2017-03-31 -
ABB机器人如何添加一个新的有效载荷并设置数据声明? 【图】
关键词:ABB,机器人,如何,添加,一个,新的,有效,载荷,设置,数创建有效载荷时会发生什么情况? 程序将建立一个 loaddata 类型的变量。 变量的名称就是有效载荷的名称。 添加一个新的ABB机器人有效载荷并设置数据声明 有效载荷坐标(包括方向)应该建立在大地坐标系上。 操作 1 在 ABB ,创建一个新的有效载荷。输入数据... 阅读更多>>
2017-03-28 -

ABB机器人如何手动设置用户框架值和工件框架值? 【图】
关键词:ABB,机器人,如何,手动,设置,用户,框架,工件,设置,A设置ABB机器人工件和用户坐标系位置的最简单方式是使用定义工件坐标系 页 158 介绍的方法。 你也可使用下图向导手动编辑该值。 附注 也可通过 程序数据 窗口编辑工件数据。... 阅读更多>>
2017-03-30 -

KUKA机器人安装系统时保存设置(退出设置,保存数据)步骤 【图】
关键词:KUKA,机器人,安装,系统,保存,设置,退出,数据,步骤,为了使改变起作用必须保存设置。选择菜单退出设置,保存数据,按下回车键。一个确认请求出现,必须按Y响应。系统将重新启动。 注意:当系统重新启动时,引导盘已经装入软盘驱动器中,以便你能继续使用系统。... 阅读更多>>
2017-03-29 -
KUKA机器人安装系统时BIOS如何设置? 【图】
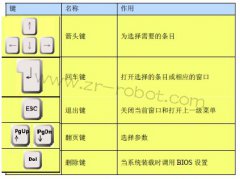
关键词:KUKA,机器人,安装,系统,BIOS,如何,设置,更换,硬更换硬盘后,执行计算机的 BIOS 设置,检查参数,必要时改变参数。 仅能改变示出的区域! BIOS 设置不能接受不正确的设置 BIOS 设置的外观和结构根据操作和使用的硬件而不同,也许和示例中的插图不同。 BIOS 设置时需要使用下列键: 打开KUKA机器人控制器。... 阅读更多>>
2017-03-29 -
ABB机器人怎么设置将工具固定? 【图】
关键词:ABB,机器人,怎么,设置,工具,固定,固定,工具,包含,大固定工具 在包含大型机械(例如切割工具、压具和冲压切具)的应用中,会使用固定工具。当ABB机器人上的工具使用不便或操作困难时,您可以使用固定工具来执行操作。有了固定工具,ABB机器人就可握住工件。 将工具固定 这里介绍如何将工具固定。 操作 1. 在 AB... 阅读更多>>
2017-03-25 -
如何设置FANUC焊接机器人焊接开始指令? 【图】
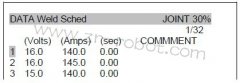
关键词:如何,设置,FANUC,焊接,机器人,开始,指令,Arc,S1、Arc Start [i] : 设置FANUC焊接机器人焊接条件号 i:焊接条件号(1 到32)按MENU? ---next page--- ? Data?Weld Sched 可以进入设置焊接条件画面 2、Arc Start[ V,A ] 设置焊接开始条件 V : 电压 A : 电流... 阅读更多>>
2017-03-26 -
ABB机器人是怎么设置工具方向? 【图】
关键词:ABB,机器人,怎么,设置,工具,方向,使用,实例,弧焊,研使用实例 弧焊、研磨和分配工具需要定向,使其与工件保持特定的角度,以便获得最佳效果。您还需要设置钻、铣、锯的角度。 当将工具中心点微调至特定位置(例如工具操作起始点)时,在大多数情况下需要设置工具方向。设置工具方向后,将继续以线性动作进行微... 阅读更多>>
2017-03-18
