
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

KUKA库卡机器人常见的故障处理方法 【图】
关键词:KUKA,库卡,机器人,常见,故障,处理,方法,KUKA,机KUKA机器人常见故障 KUKA库卡机械手不供电,没任何反应; KUKA机器人1-6轴,任意一轴不动,卡死; KUKA库卡机械手PC死机、 KUKA机器人电脑不能启动 、电脑无任何反应、黑屏; KUKA机器人控制柜不能跟电脑通讯,报错; KUKA库卡机械手伺服电机刹车不灵,卡死... 阅读更多>>
2016-11-24 -
工业机器人故障的原因分析 【图】
关键词:工业,机器人,故障,原因分析,工业,机器人,几十年,发展,起工业机器人是近几十年发展起来的一种高科技自动生产设备,是工业机器人的一个重要分支。工业机器人的种类,按驱动方式可分为液压式、气动式、电动式等它的特点是可以通过编程来完成各种预期的作业,在构造和性能上兼有人和机器各自的优点,尤其体现在人的智... 阅读更多>>
2016-11-24 -
FANUC伺服驱动器维修故障实例 【图】
关键词:FANUC,伺服,驱动器,维修,故障,实例,报警,信息,后台一,报警信息 1、后台编辑报警 报警信息: BP/S alarm,BP/S报警。 报警说明: 与一般的程序编辑中发生的P/S号报警相同,发生BP/S报警(070、071、072、073、074、085、086、087)。 2. 140号报警 报警信息: BP/S alarm,BP/S报警。 报警说明: 在后台选择... 阅读更多>>
2016-11-23 -
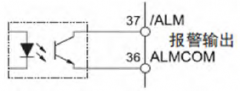
机器人驱动器报警输出信号不动作故障原因 【图】
关键词:机器人,驱动器,报警,输出,信号,动作,故障,原因,伺服,驱伺服驱动器报警输出信号不动作故障原因 1. 故障现象:伺服驱动器报警输出信号不动作; 2. 故障原因:流过报警输出回路的电流过大,导致报警输出晶体管击穿损坏。 (1)报警输出串联接入继电器回路时,在继电器闭合时产生很强的反向电动势,使得报警输出晶体... 阅读更多>>
2016-11-23 -
-
abb机器人IRB3400工业机器人死机故障诊断与维修 【图】
关键词:abb,机器人,IRB3400,工业,死机,故障,诊断,维修我校FMC中心的柔性制造单元中采用了瑞典ABB公司的IRB3400型工业机器人。在一次正常的系统运行过程中,机器人突然死机,并发出报警信息20001(工作回路断开)和10010(马达关闭状态),当时没有其它异常现象。此后,每次开机时都出现六条错误,其中包括20001错误... 阅读更多>>
2016-11-23 -
KUKA库卡机器人示教器维修常见故障 【图】
关键词:库卡,kuka,机器人,示教,维修,常见,故障,库卡,机器人库卡机器人示教器的主要工作部分是操作键与显示屏,在库卡机器人系统中,KUKA库卡机器人教导盒是人与机器人交互的界面,可由操作者手持移动,使操作者能够方便地接近工作环境进行视教编程。库卡机械手示教盒控制电路的主要功能是对操作键进行扫描并将按键信... 阅读更多>>
2016-12-05 -
机器人控制柜常见故障及解决方法 【图】
关键词:机器人,控制,常见,故障,解决,方法,常见问题: 一:开关经常跳或者不能合闸? 1. 开关老化 2 .开关选型不对 3 .水泵卡死或电机内部短路 4 .线路老化,短路,用线过小或者缺相。 解决方法: 将控制系统的电源关掉,然后用绕表量电机,电路的三相是否有短路或接地现象(测量时注意:要把变频输出... 阅读更多>>
2016-11-23 -
伺服驱动器的常见异常故障分析 【图】
关键词:伺服,驱动器,常见,异常,故障,分析,伺服,驱动器,常见,故伺服驱动器常见故障:无显示、缺相、过流、过压、欠压、过热、过载、接地、参数错误、有显示无输出、模块损坏、报错等; AL 21 RL 21 电源故障,电流过大,驱动器的U、V、W相和驱动器电机之间的连线短路或者U、V、W相接地 AL 22 RL 22 电源检测异常 伺服驱动... 阅读更多>>
2016-11-23 -
安川机器人操作及简单故障处理 【图】
关键词:安川,机器人,操作,简单,故障,处理,MOVJC0011VJMOVJC0011VJ=50.00(移动到位置C;MOVJC0012VJ=50.00(移动到位置C;MOVJC0013VJ=50.00(移动到位置C;MOVJC0014VJ=50.00(移动到位置C;WAITIN#(31)=OFF;WAITIN#(31)=ON;MOVLC0015V=1100.0;MOVLC0016V=200.0;DOUTOT#(1)OFF; MOVJ C0011 VJ=50.00 (移... 阅读更多>>
2016-11-23 -
焊接机器人应用中存在的问题和故障 【图】
关键词:焊接,机器人,应用,中存,在的,问题,故障,弧焊,机器,人多弧焊机器人多采用气体保护焊方法(MAG、MIG、TIG),通常的晶闸管式、逆变式、波形控制式、脉冲或非脉冲式等的焊接电源都可以装到机器人上作电弧焊。由于机器人控制柜采用数字控制,而焊接电源多为模拟控制,所以需要在焊接电源与控制柜之间加一个接口。 近... 阅读更多>>
2016-11-23 -
机器人故障诊断 机器设备故障诊断的发展过程 【图】
关键词:机器人,故障,诊断,机器,设备,发展,过程,公有制为主体、多种所有制经济共同发展是我国社会主义初级阶段的一项基本经济制度。这一基本经济制度是1997年党的十五大正式提出的。1999年,第九届全国人民代表大会通过的宪法修正案,将国家在社会主义初级阶段坚持公有制为主体,多种所有制经济共同发展 目... 阅读更多>>
2016-11-23
