
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-

喷涂机器人维修故障诊断以及处理方法
关键词:喷涂,机器人,维修,故障,诊断,以及,处理,方法,引言,喷涂一、引言 喷涂机器人是一种广泛应用于自动化喷涂领域的设备,可以提高生产效率和质量。然而,在长时间使用过程中,喷涂机器人可能会出现各种故障,影响其正常运行。本文将介绍喷涂机器人维修故障诊断以及处理方法,帮助用户更好地维护和使用喷涂机器人。 二 ... 阅读更多>>
2023-12-21 -

喷涂机器人示教器通电不显示的维修方法
关键词:喷涂,机器人,示教,通电,显示,维修,方法,故障,现象,喷涂一、故障现象 喷涂机器人示教器通电后,屏幕不显示或者显示异常,可能的原因包括电源故障、示教器内部电路故障、显示屏故障等。 二、维修步骤 检查电源:首先检查喷涂机器人的电源是否正常,包括电源线是否接触良好,电源电压是否在正常范围内。如果电源正常 ... 阅读更多>>
2023-12-21 -

安川MPO10新型敞开式喷涂机器人安全装置概览
关键词:安川,MPO10,新型,敞开式,喷涂,机器人,安全装置,概览喷涂机器人安全装置概览如下: 防护装置:包括防护栏、防护罩等,用于防止机器人非正常移动或与人体接触,从而避免事故发生。 紧急停止装置:用于在紧急情况下快速停止机器人的运行,防止事故扩大。 限位装置:用于限制机器人的运动范围,防止其移动到危险区 ... 阅读更多>>
2023-12-09 -

如何在工具坐标系中移动喷涂机器人
关键词:何在,工具,坐标系,移动,喷涂,机器人,工具,坐标系,移动,在工具坐标系中移动喷涂机器人,可以按照以下步骤进行: 选择工具坐标系:首先,需要选择所使用的工具坐标系。这通常是在机器人的控制系统中完成的,可以通过选择相应的工具坐标系编号来实现。 设定手动倍率:为了确保移动过程中的安全和精度,需要设定手动 ... 阅读更多>>
2023-12-09 -

怎么进行喷涂机器人线性单元的配置
关键词:怎么,进行,喷涂,机器人,线性,单元,配置,喷涂,机器人,线喷涂机器人线性单元的配置可以参考以下步骤: 选择合适的喷涂机器人:喷涂机器人应具有高精度、高速度、高灵活性等特点,以适应各种复杂的喷涂需求。 确定线性单元的规格和尺寸:根据喷涂机器人的工作范围和喷涂需求,确定线性单元的规格和尺寸,以确保喷涂 ... 阅读更多>>
2023-12-09 -

发那科FANUC机器人无示教器操作功能
关键词:发那科,FANUC,机器,人无,示教,操作,功能,一般来说,一般来说,操作FANUC机器人时,需要使用FANUC示教器iPendant来对机器人进行示教、做信号配置等。对于熟练使用示教器的用户来说,示教器就是他们控制机器人的工具。没有示教器,还能控制机器人吗?答案是肯定的。 Jogging iPendant(JITP) Jogging iPendant ... 阅读更多>>
2020-06-12 -

KUKA库卡机器人常用英文缩写
关键词:KUKA,库卡,机器人,常用,英文,缩写,术语,说明,CCU术语 说明 CCU CabinetControlUnit(柜内控制单元) CSP ControllerSystemPanel(控制系统操作面板) EDS; ElectronicDateStorage(电子数据存储卡) EMD ElectronicMasteringDevice(用于机器人零点校准的电子控制装置) EMC ElektromagneticCompatibility(电磁兼容 ... 阅读更多>>
2020-04-30 -
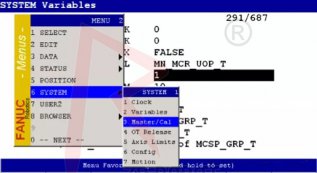
FANUC发那科机器人报警消除
关键词:FANUC,发那科,机器人,报警,消除,如何,消除,SRVO一.如何消除SRVO-062 SRVO062SVAL2BZALalarm(Group:iAxis:j)为脉冲编码器数据丢失报警 解决方法: 1、首先检查下机器人电池是否电量不足 2、依次按下MENU0(下一页,选择SYSTEMMaster/cal. 3、如果没有Master/cal选项更改变量$MASTER_ENB 4、按下F3(RES ... 阅读更多>>
2020-03-26 -
KUAK库卡机器人配置与基恩士PLC以EIP通讯
关键词:KUAK,库卡,机器人,配置,基恩,PLC,EIP,通讯,硬一.硬件: 1 机器人 库卡 KR30 HA 高精度机器人 2 PLC 基恩士 PLC 型号: KV7500 3 通讯方式 二者通过Ethernet/IP协议进行通讯:PLC作为Scanner,机器人作Adapter 二.软件: 序号 软件名 版本 1 库卡控制系统-KSS KSS8.3.36 2 库卡工程软件-Workvisual 4.0.29 ... 阅读更多>>
2020-03-18 -

KUKA库卡机器人编程之运动编程
关键词:KUKA,库卡,机器人,编程,运动,DEF,Motion,EDEF Motion_Example( ) DECL INT I ;------------Motion1------------------------------------------------ BAS(#VEL_PTP,30) ;;Set PTP Axis Velocity BAS(#ACC_PTP,50) ;;Set PTP Axis Acceleration PTP{A1 0,A2 -80,A3 80,A4 50,A5 60,A6 90} ;--------- ... 阅读更多>>
2020-01-02 -

库卡KUKA机器人程序注释详解(项目案例)
关键词:库卡,KUKA,机器人,程序,注释,详解,项目,案例,Cel1、Cell.src为主程序,与PLC通讯调用其他子程序。正常工作前,应先手动回到Home位,选定cell.src,再将模式切换为EXTAUTO。 2、t.src为回home 位程序,自编。 3、TREATMENT_PIECE.src为工件型号处理程序,里面有TREATMENT_PIECE和TREATMENT_PIECE2,意思是有 ... 阅读更多>>
2019-12-28 -

发那科FANUC机器人抓取程序案例
关键词:发那科,FANUC,机器人,抓取,程序,案例,TIMER,R1:TIMER[1]=RESET 2:TIMER[1]=START 3:UTOOL_NUM=1 [工具坐标系1] 4:UFRAME_NUM=1 [用户坐标系1] 5:OVERRIDE=50% [速度50%] 6:D0[101]=OFF [机器人抓手关闭状态] 7:WAIT DI[105]=ON [回原点信号] 8:WAIT DI[101]=ON [机器人抓手原位磁性开关] 9:J P[1] 50% F ... 阅读更多>>
2019-12-27
