
- ������������˼�������˾
- �������ߣ�020-82000787(8:30-17:30)
- ��ϵ�ֻ���15889988091(�ǹ���ʱ��)
- ������020-82000787
- ���棺020-32887675
- ���䣺gz@zr-robot.com
- �����з�خ�������ֽ�ɽ�ȴ���˽�1��109
- ��ǰλ�ã���ҳ > ��Ϳ������ά�� >
-

KUKA�������������ṹ���ܱ�����ϸע��
�ؼ���:KUKA,�,������,���,����,�ṹ,����,����,��ϸ,... �Ķ�����>>
2019-12-27 -

�ɻ�������yaskawa�����˹���ά�ϼ�
�ؼ���:�ɻ�,����,yaskawa,������,����,ά��,�ϼ�,������01�������˿��ؾ��������߲��ܺ�բ�� ԭ�� 1.�����ϻ��� 2.����ѡ�Ͳ��ԣ� 3.ˮ�ÿ��������ڲ���·�� 4.��·�ϻ�����·�����߹�С����ȱ�ࡣ ����취�� ������ϵͳ�ĵ�Դ�ص���Ȼ�����Ʊ����������·�������Ƿ��ж�·��ӵ�������ʱע�⣺Ҫ�ѱ�Ƶ ... �Ķ�����>>
2019-12-26 -
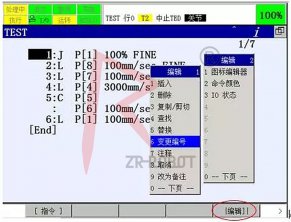
���ǿ�Fanuc������ָ��༭��ȫ
�ؼ���:���ǿ�,Fanuc,������,ָ��,�༭,��ȫ,����,�༭,������༭���棬�ڱ༭��EDCMD������һϵ�еĹ���ѡ������ص�Ա����š�ȡ������Ϊ��ע������������ϸ���ܡ� 1.�����ţ�Renumber�� ��ѡ��Ĺ��������ǣ�������ʽ���ӹ�������������϶��¸��������λ�ñ����µ�λ�ñ�ţ�ʹ�����е�λ�ñ�Ÿ��� ... �Ķ�����>>
2019-12-25 -
KUKA���������ôģ��������������
�ؼ���:KUKA,�,������,��ô,ģ��,����,���,���,ģ��,��ģ������˱�� KRC4����32��ģ������� Ϊ��Щģ���ź���Ҫ�䱸����Ϊѡ���ṩ������ϵͳ������ͨ�� WorkVisual������� ģ�������ͨ��ϵͳ����$ANIN[1]...$ANIN[32]���� ��ÿ��12msһ�Σ�ѭ����ȡһ��ģ������� $ANIN[nr]��ֵ��1.0��-1.0֮��仯���� ... �Ķ�����>>
2019-12-23 -

ͼ��FANUC������I/O�źŰ�ӿڶ������װ
�ؼ���:ͼ��,FANUC,������,�ź�,�ӿ�,����,��װ,1.I,��1.I/O�ź�JA�壨A16B-2204-0010�� 1.1JA�źŰ���Ҫ�ӿڶ��� 1.2��ɫ���ϵ�LED���� 1.3���ӷ���ͼ ��� ���� ��ע �� 1 �� I/O LINK ���� �������źŰ��ͨѶ���� �� 2 �� I/O LINK ���� �źŰ����źŰ��ͨѶ���� �� 3 ������ 4 ������ 5 ������ 6 �� ��Χ�� ... �Ķ�����>>
2019-12-20 -

�kuka�������ⲿ�����ò������
�ؼ���:�,kuka,������,�ⲿ,����,����,���,��һ��,������һ����������IP���ij� ����ͬһIP���ڼ��ɡ� �ڶ������������õ��Ժͻ��������� ����������Workvisual����(���¼��WV����) ����������ͼ1��ʾ�� ͼ1��WV�������� ��WV�����Ĵ�������ͼ2��ʾ ͼ2��Ŀ�ļ�ѡ�� ��ѡ��Browseʱ��������ͼ3��ʾ ͼ3 ... �Ķ�����>>
2019-12-19 -

KUKA�KRC4�����˳���ͨ�缰���У��
�ؼ���:KUKA,�,KRC4,������,����,ͨ��,���,У��,��һ���������Ӷ��������ϵ�������ȫ�����ģ����������У�� DANGER Σ��! ���밲װ�̶��û����ˣ�����ͨ����������ˣ������ڲ�������������£�����������ˤ��������豸����Ա��ȫ���⡣ �����˳���ͨ��������� ���ƹ��ͣ��ӿ�ͼʾ���£� ������ ... �Ķ�����>>
2019-12-18 -

��ô���п���������Ե�Ԫ������
�ؼ���:��ô,����,�,������,����,��Ԫ,����,KUKAKL-1KUKAKL-100���Ի��� KUKA���Ի���KL100��һ����װ�ڵ��桢�컨���ǽ���ϵĶ����������Ի��졣�ڰ��ˡ�װж�����ϼӹ���������������Ӧ�÷dz��㷺�� KL100��Ϊ�����˵ĸ��������У�������KRAGILUSϵ�е����л����ˡ��ɴˣ����ƾ�����Ӧ�Ļ����˿������� ... �Ķ�����>>
2019-12-14 -
��ô��д�KUKA������רҵ����д������
�ؼ���:��ô,��д,�,KUKA,������,רҵ,����,��,д��,KUKA ����д���������� ������ץץ�ֳ��� DEF Q1_PICKGRPPER( ) : �������� INI �� ϵͳ��ʼ�� PTP HOME Vel= 100 % DEFAULT �� HOME ԭ�� OUT 272 Grip2_Bracket_Open State=TRUE �� ��� 272 ץ�� 2 �����Ǵ��ź�Ϊ�� OUT 271 Grip2_Bracket_Cls State ... �Ķ�����>>
2019-12-10 -
���ǿ�FANUC�����˱�д�ij�����ϸ�̳�
�ؼ���:���ǿ�,FANUC,������,��д,��,����,��ϸ,�̳�,RRobotΪ�Զ����豸�������Զ�����ת֮ǰ�������ȸ���RobotҪ�Զ������Щ����������дRobot���ɴﵽ��Ŀ�ġ� Robot������Ҫ�ɡ�����ָ����ɣ�ֻҪ��Ϥ�ֶ�����Robot�ķ�ʽ����Robot�ƶ�������䛵�λ�ã������ڡ��̵㡹��ͬʱ��ɶ���ָ����Robot ... �Ķ�����>>
2019-12-03 -
������˱�̼���֮Frame����
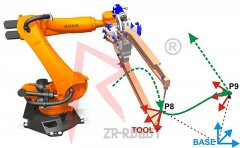
�ؼ���:�,������,��̼���,Frame,����,������֪,KUKA������֪��KUKA ����������ϵ��ŷ���DZ�ʾ�� XYZABC������XYZ�����Ծ��룬ABC������ת�Ƕȣ���ŷ���ǣ���������˵ĵѿ����任��˳���ǣ�Z-Y-X,��A-B-C��Rz-Ry-Rx���������Ե�ǰ����̬��Ϊ�ο��� �ڿ��̻����У�����������һ��ϵͳ�ṹ����������Frame ... �Ķ�����>>
2019-12-03 -

�KUKA�������ⲿ�Զ�����ģʽ�Ĺ��̺�����
�ؼ���:�,KUKA,������,�ⲿ,�Զ�,����,ģʽ,����,����,���ò������ⲿ�Զ����� 1.ͨ���ⲿ�Զ����нӿڿ����ϼ���������������һ��PLC�������ƻ����˽��� 2.�ϼ�����ϵͳͨ���ⲿ�Զ����нӿ�������˿���ϵͳ���������˽��̵�����ź� �����������ɡ�����ȷ�ϡ����������ȣ��������˿���ϵͳ���ϼ�����ϵͳ���� ... �Ķ�����>>
2019-12-02
