

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-
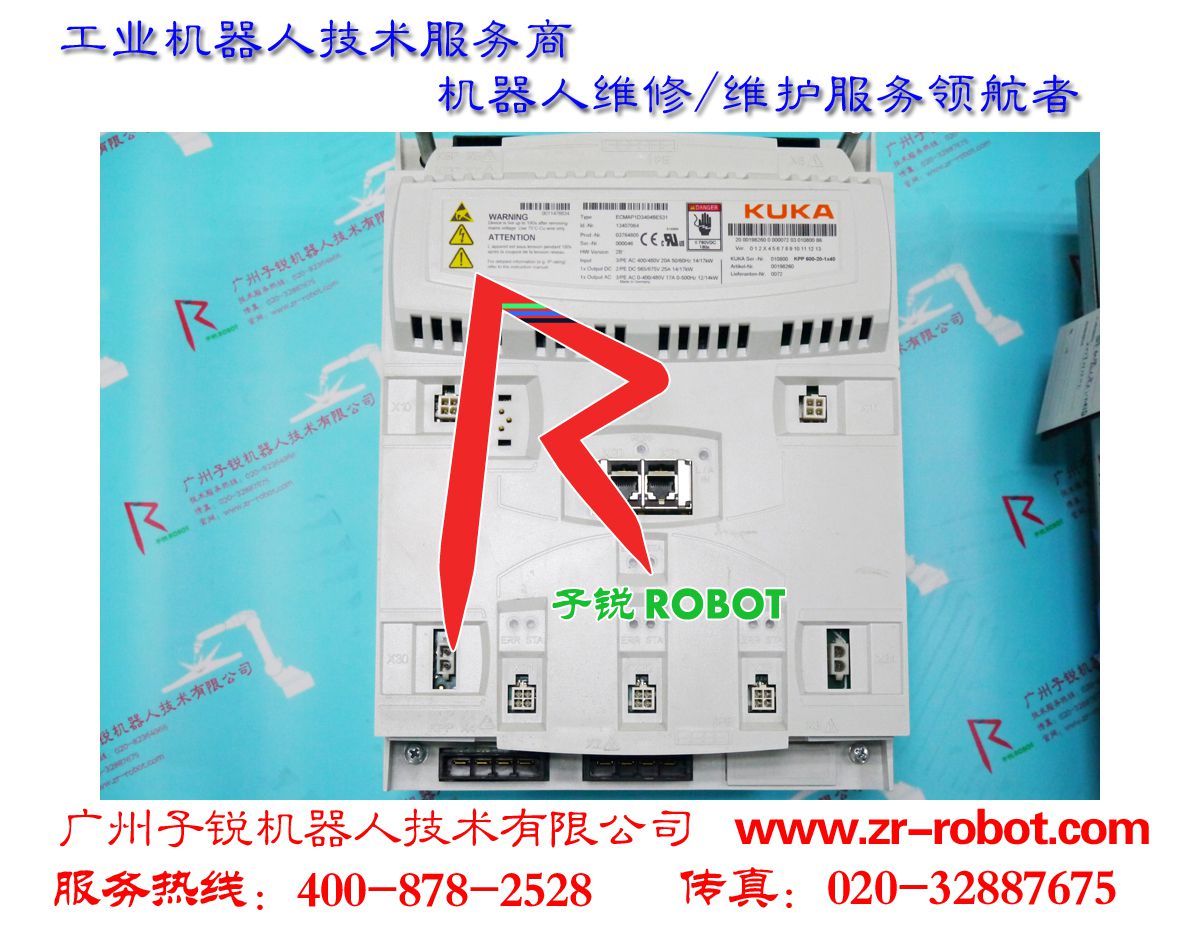
KUKA机器人00-198-266库卡KSP驱动器驱动器报警
关键词:KUKA,机器人,00-198-266,库卡,驱动器,报警KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 产品名称:库卡KSP600-3X64伺服包维修 产品链接:手机版链接:库卡KSP600-3X64伺服包维修首选广州子锐机器人科技有限公司,公司专业配备库卡KSP600驱 ... 阅读更多>>
2017-10-26 -
KUKA机器人00-198-266库卡KSP控制器亮红灯
关键词:KUKA,机器人,00-198-266,库卡,控制器,红灯KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 广州子锐机器人技术有限公司一直致力于工业机器人维修、保养的研究,经过多年的发展,对工业机器人数控、工控产品维修有着技术过硬的维修方案、和 ... 阅读更多>>
2017-10-25 -
KUKA机器人00-198-266库卡C4伺服控制器现货
关键词:KUKA,机器人,00-198-266,库卡,伺服,控制器,KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 KUKA库卡KSP600-3x64广州子锐机器人技术有限公司,好多用户找了很多维修公司,后还是选择广州子锐,本公司拥有KUKA库卡KSP600-3x64维修各系列测试 ... 阅读更多>>
2017-10-22 -
KUKAKSP600-3x20库卡C4驱动器驱动器报警
关键词:KUKAKSP600-3x20,库卡,驱动器,报警KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 KUKA库卡KSP600-3x64广州子锐机器人技术有限公司,好多用户找了很多维修公司,后还是选择广州子锐,本公司拥有KUKA库卡KSP600-3x64维修各系列测试 ... 阅读更多>>
2017-09-30 -
KUKAKSP600-3x20库卡C4控制器驱动器报警
关键词:KUKAKSP600-3x20,库卡,控制器,驱动器,报警KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 KUKA机器人维修保养维护调试: 1。润滑油脂 2。保养备件包电池,冷却风扇。 二、本体标准保养常规检查 1。本体清洁 根据现场工作对机器人本体进行除 ... 阅读更多>>
2017-08-18 -
KUKAKSP600-3x20库卡C4控制器维修
关键词:KUKAKSP600-3x20,库卡,控制器,维修KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 库卡KSP600-3x4000-198-268 库卡机器人驱动模块销售维修型号包括: 库卡KRC2控制系统驱动模块型号: 库卡机器人伺服驱动KSD1-08、 库卡机器人KSD1 ... 阅读更多>>
2017-08-18 -

KUKAKSP600-3x20KUKAKSP伺服控制器亮红灯
关键词:KUKAKSP600-3x20KUKAKSP,伺服,控制器,KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 名称:库卡C4机器人驱动 维修型号:KSP6003X64 子锐机器人专业从事工业机器人维修,ABB,库卡,安川,发那科,焊接机器人等。示教器,伺服电机, ... 阅读更多>>
2017-08-18 -
KUKAKSP600-3x20KSP驱动器驱动器报警
关键词:KUKAKSP600-3x20KSP,驱动器,报警KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 广州子锐机器人技术有限公司一直致力于工业机器人维修、保养的研究,经过多年的发展,对工业机器人数控、工控产品维修有着技术过硬的维修方案、和 ... 阅读更多>>
2017-08-18 -
KUKAECMAS3D2224BE531库卡KSP控制器亮红灯
关键词:KUKAECMAS3D2224BE531,库卡,控制器,红灯KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 库卡KRC4驱动器出现故障比如:库卡驱动模块KSP 600-3X40红灯闪烁故障,库卡机器人伺服驱动KSP 600-3X40无法启动维修,KSP 600库卡驱动器报警异常 ... 阅读更多>>
2017-08-18 -
KUKAECMAS3D2224BE531库卡KSP伺服驱动器维修
关键词:KUKAECMAS3D2224BE531,库卡,伺服,驱动器KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 名称:KUKA库卡驱动模块型号:KSP600-3X64 数量:长期备有现货价格:电议【原装正品及二手备件齐全】 优势提供KUKA库卡机器人维修,安装,培训, ... 阅读更多>>
2017-08-17 -
KUKA00-198-268库卡C4伺服控制器现货
关键词:KUKA00-198-268,库卡,伺服,控制器,现货KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 KUKA机器人维修保养维护调试: 1。润滑油脂 2。保养备件包电池,冷却风扇。 二、本体标准保养常规检查 1。本体清洁 根据现场工作对机器人本体进行除 ... 阅读更多>>
2017-08-17 -
KUKA00-198-266库卡C4控制器现货
关键词:KUKA00-198-266,库卡,控制器,现货KSP600-3X64/00198268 KSP600-3x20/ECMAS3D2224BE531/00-198-266 KSP600-3x40/ECMAS3D4444BE531/00-198-268 广州子锐机器人技术有限公司 优势提供kuka库卡机器人维修,安装,培训,保养,改造服务 ---kuka机器人系统集成服务--- 现货销售价格面议所售产品 ... 阅读更多>>
2017-08-16
