

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-
发那科fanuc机器人怎么创建动作指令
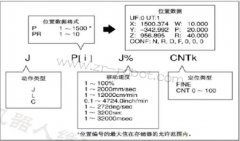
关键词:发那科,fanuc,机器人,怎么,创建,动作,指令,指令,移所谓动作指令, 是指以指令的移动速度和移动方法使机器人向作业空间内的指定位置移动的指令,动作指令中指定的内容如下。 ○ 动作类型-指定向指定位置的轨迹控制。 ○ 位置数据-对机器人将要移动的位置进行示教。 ○ 移动速度-指定机器人的移动速度。 ○ 定位类型-指定 ... 阅读更多>>
2019-08-01 -

库卡KUKA机器人KRC2示教器用户模式导航
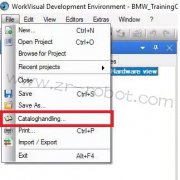
关键词:库卡,KUKA,机器人,KRC2,示教,用户,模式,导航,导1 导航 2 导航中的图表 驱动器 目录和文档 3 用键盘导航 4 新建程序 5 编程状态 6 存档 这个功能允许你把重要的数据存储到软盘中。 所有的文件将会以ZIP 压缩文件的形式存放。 7 存档所有 菜单项目存档所有被用于向软驱中储存恢复机器人系统所需的所有数据。 ... 阅读更多>>
2019-07-31 -

发那科FANUC机器人怎么创建程序
关键词:发那科,FANUC,机器人,怎么,创建,程序,程序,创建,记程序创建 记录程序记录程序录时,创建一个新的空程序。 设定程序详细信息设定程序详细信息时,设定程序的属性。 修改标准指令语句修改标准指令语句时,重新设定动作指令的示教时要使用的标准指令。 示教动作指令示教动作指令时,对动作指令和动作附加指令进 ... 阅读更多>>
2019-07-30 -
发那科机器人怎么设定刀具坐标系
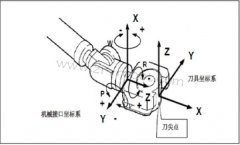
关键词:发那科,机器人,怎么,设定,刀具,坐标系,设定,刀具,坐标系设定刀具坐标系 刀具坐标系,是代表刀尖点( TCP)和刀具姿势的笛卡尔坐标系。刀具坐标系通常以TCP为原点,将刀具方向取为Z轴。 未定义刀具坐标系时,将有机械接口坐标系来替代该坐标系。 刀具坐标系,由刀尖点( TCP)的位置( X、Y、Z)和刀具的姿势(W、P ... 阅读更多>>
2019-07-27 -

KUKA库卡机器人零点校准
关键词:KUKA,库卡,机器人,零点,校准,点击,选择,取消,程序,点击R选择取消选择程序 点击菜单----配置----用户组 选择安全调试员,再输入密码: kuka 点击菜单----投入运行----调整---EMD----标准----执行零点校正 将电子校正工具EMD插入机器人底座后面插孔 将机器人第一轴校准,在1轴该处将螺帽扭下,然后将测量套筒扭 ... 阅读更多>>
2019-07-26 -
库卡KUKA机器人线性单元的配置
关键词:库卡,KUKA,机器人,线性,单元,配置,KUKA,KL-1KUKA KL-100线性滑轨 KUKA 线性滑轨 KL 100 是一个安装在地面、天花板或墙壁上的独立单轴线性滑轨。在搬运、装卸、塑料加工、检测或检验等领域应用非常广泛。 KL 100 作为机器人的附加轴运行,适用于 KR AGILUS 系列的所有机器人。由此,控制就由相应的机器 ... 阅读更多>>
2019-07-25 -
库卡KUKA机器人外部自动运行模式的过程和配置方法
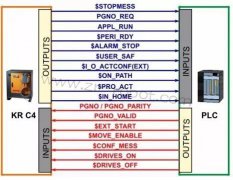
关键词:库卡,KUKA,机器人,外部,自动,运行,模式,过程,配置,配置并采用外部自动运行 1.通过外部自动运行接口可用上级控制器(例如用一个PLC)来控制机器人进程 2.上级控制系统通过外部自动运行接口向机器人控制系统发出机器人进程的相关信号 (如运行许可、故障确认、程序启动等)。 机器人控制系统向上级控制系统发送 ... 阅读更多>>
2019-07-25 -

FANUC发那科机器人R-2000i系列机器人更换本体电缆全程详解一
关键词:FANUC,发那科,机器人,R-2000i,系列,更换,本体对R-2000i机器人进行更换本体电缆操作,该型号的本体电缆分为动力电缆和编码器电缆,更换的方法类似。 使用工具清单: 内六角扳手一套、斜口钳、十字螺丝刀,一字螺丝刀、鱼嘴钳、退针器、尼龙扎带若干 作业中安全用品一览: 安全帽、安全挂锁、手套、安全鞋 ... 阅读更多>>
2019-07-24 -

FANUC发那科机器人R-2000i系列机器人更换本体电缆全程详解二
关键词:FANUC,发那科,机器人,R-2000i,系列,更换,本体1.将电缆用尼龙扎带束紧后,用螺栓将电缆固定在J2轴机臂上。 2.将盖板安装到J2机臂上。 3.新电缆在需要固定并扎紧的部位有黄色胶带标记,按照标记固定并束紧扎带,如果绑的过后或者过前会导致之后的走线不顺畅。 4.用扎带将电缆束紧,将J1轴的上侧盖板固定在 ... 阅读更多>>
2019-07-24 -

发那科FANUC机器人视觉零点标定操作
关键词:发那科,FANUC,机器人,视觉,零点,标定,操作,机器,人机器人的零点标定是需要将机器人的机械信息和位置信息同步,来定义机器人的物理位置,从而使机器人能够准确地按照原定位置移动。通常在机器人出厂前已经进行了零点标定。但是,机器人还是很有可能丢失零点数据,需要重新经行零点标定。 在如下情况,机器人必 ... 阅读更多>>
2019-07-23 -
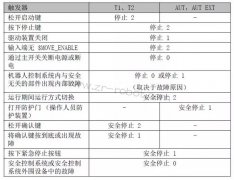
库卡KUKA机器人造成停机方式有哪些
关键词:库卡,KUKA,机器人,造成,停机,方式,哪些,概要,下图,一。概要: 下图这张来自库卡教材上的图片展示了在各模式下,各种操作触发带来的停机方式: 由表可以看出库卡机器人停机方式可以分为以下几种: (1)与安全相关的停机方式: 安全停止 0 | 停止1|停止2; (2)安全无关常规停机方式: 停止0 |停止1 |停止 2; ... 阅读更多>>
2019-07-22 -

库卡KUKA机器人蓄电池在线检测方法
关键词:库卡,KUKA,机器人,蓄电池,在线,检测,方法,库卡,机器库卡机器人蓄电池在线检测方法 1、库卡蓄电池的作用: (1)机器人控制系统会在断电时借助蓄电池在受控状态下关闭。 (2)蓄电池接受控制柜的充电以及周期式的电量监控。 (3)蓄电池管理器接收一项电脑任务的控制,并且通过一条与控制柜连接的 USB连接线而 ... 阅读更多>>
2019-07-22
