
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

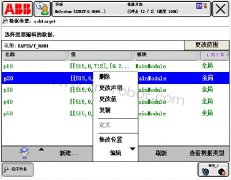
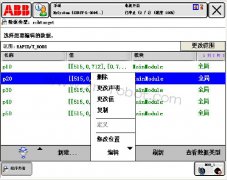
ABB机器人删除数据实例和复制数据实例的步骤 【图】
关键词:ABB,机器人,删除,数据,实例,步骤,删除,数据,实例,操删除数据实例 操作 1. 点击ABB菜单中的 删除 以删除数据实例,一个对话框显示。 2. 如果您确定要删除数据实例,请点击 是 显示软键盘,然后更改名称。 复制数据实例 操作 1. 点击菜单中的 复制 以复制数据实例,数据实例副本创建。该副本与原始数据实例有相... 阅读更多>>
2017-03-23 -
ABB机器人如何编辑数据实例值? 【图】
关键词:ABB,机器人,如何,编辑,数据,实例,操作,参考,信息,点操作参考信息 1. 点击更改值以删除数据实例,详情请参阅 2. 点击数值打开键盘或选择列表。(编辑数值的方式取决于数据类型和可能的数值,例如文本、数字、预定义值等。) 3. 选择或输入一个新值。 4. 点击确定。 附注 在正在运行的程序中,如果持续变量值发... 阅读更多>>
2017-03-23 -
ABB机器人怎么样查看数据类型? 【图】
关键词:ABB,机器人,怎么样,查看,数据,类型,概述,本节,介绍了概述 本节介绍了如何查看 程序数据 窗口中的数据实例。 同时还详细介绍了如何编辑、删除和定义数据实例以及如何更改数据实例的声明。有关 tooldata、wobjdata 和 loaddata 等数据类型的详情,查看数据实例 本节详细介绍如何查看数据类型的可用实例。 操作 1.... 阅读更多>>
2017-03-26 -
ABB机器人查看数据类型的可用实例的操作步骤 【图】
关键词:ABB,机器人,查看,数据,类型,可用,实例,操作步骤,查看查看数据实例 本节详细介绍如何查看数据类型的可用实例。 操作 1. 在 ABB 菜单中,点击程序数据。 2. 点击您想要查看的数据类型,然后点击显示数据。 3. 选择您想要编辑的数据实例,然后点击编辑。 4. 根据您想要执行的操作,点击以下一项菜单项: (1)点击... 阅读更多>>
2017-03-23 -

ABB机器人如何新建数据类型的数据? 【图】
关键词:ABB,机器人,如何,新建,数据,类型,操作,ABB,菜单,操作 1. 在 ABB 菜单中,点击程序数据。 显示所有可用数据类型的列表。 2. 点击要创建的数据实例类型(例如 布尔型 。 显示数据 右边的 显示所有数据类型实例的列表。 3. 点击 新建 ,定义数据实例的名称。 4. 点击 名称 菜单,设置数据实例的作用域。选择:... 阅读更多>>
2017-03-22 -
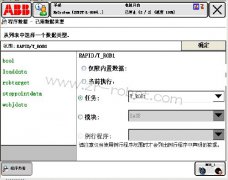
ABB机器人查看特定模块或例行程序中的数据的步骤 【图】
关键词:ABB,机器人,查看,特定,模块,例行,程序,中的,数据,步操作 1. 在 ABB 菜单中,点击程序数据。 2. 点击 更改范围 。 以下窗口将显示:、 3. 选择需要的范围: a、仅限内置数据: 显示特定系统中使用的所有数据类型 b、当前执行: 显当前执行使用的所有数据类型 c、任务:显示特定任务使用的所有数据类型 d、模块... 阅读更多>>
2017-03-22 -
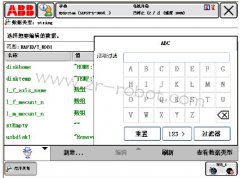
ABB机器人FlexPendant过滤数据要怎么操作? 【图】
关键词:ABB,机器人,FlexPendant,过滤,数据,怎么,操一、过滤数据 在ABB机器人数个 FlexPendant 菜单中,您可以使用过滤功能。 此项功能非常有用,例如在查看数据类型实例时,实例的数量可能会超过可查看范围。 过滤掉以特定字符开头的实例可减少选项数量。在过滤 I/O 信号时,有多个选项可用于许多其它类型的... 阅读更多>>
2017-03-20 -
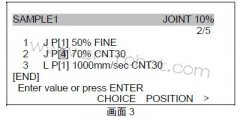
FANUC机器人直接写入数据修正点的步骤 【图】
关键词:FANUC,机器人,直接,写入,数据,正点,步骤,直接,写入直接写入数据修正点 1.移动光标到位置号(画面3)。 2.按下F5 POSITION 显示数据位置子菜单,默认的显示是通用坐标系下的数据(画面4)。 3.输入需要的新值(画面5)。 4.改变FANUC机器人数据类型,按F5 [REPRE],通用坐标系的数据将转变成关节坐标系的数据(... 阅读更多>>
2017-03-20 -
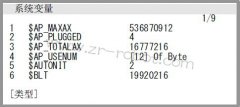
FANUC机器人零点位置标定的方法数据的输入方法 【图】
关键词:FANUC,机器人,零点,位置,定的,方法,数据,输入,FAFANUC机器人零点位置标定的方法数据的直接输入,可将FANUC机器人零点位置标定的方法数据值直接输入到系统变量中。这一操作用于FANUC机器人零点位置标定的方法数据丢失而脉冲数据仍然保持的情形。 FANUC机器人零点位置标定的方法数据的输入方法 1 、按下MENU... 阅读更多>>
2017-03-17 -
KUKA机器人超出了设定的机器数据$COM_VAL_MI 【图】
关键词:KUKA,机器人,出了,定的,机器,数据,COM,VAL,提提示文字:确认调节量〈轴号〉 原因:超出了设定的机器数据$COM_VAL_MI。位置调节器的输出进 入限定范围。KUKA机器人轴没有跟随设定值。 查询: 动态。 影响: 1.转速调整信号。 2.输出端 $ALARM_STOPO 信号。 3.封锁所有激活的命令。 应急措施: 1.检验KUKA... 阅读更多>>
2017-02-28 -
KUKA操作系统数据交换出错 【图】
关键词:KUKA,操作系统,数据,交换,出错,提示,文字,数据,交换提示文字:数据交换 原因:由于出现错误,SBC停止进行数据交换。 查询:在执行 KUKA 系统传输任务过程中动态查询。 影响: 1.信号斜坡停止; 2.SBC接口中断。 应急措施:排除KUKA系统中SBC工作程序中的错误。... 阅读更多>>
2017-02-23 -
KUKA机器人TEPRO的数据类型错误 【图】
关键词:KUKA,机器人,TEPRO,数据,类型,错误,提示,文字,提示文字:机器人TEPRO的数据类型 错误 原因:SBC动态的发送错误数据。 查询:在 KUKA机器人 执行传输任务过程中动态查询。 影响: 1.信号斜坡停止; 2.SBC接口中断 应急措施:排除SBC工作程序中的错误。... 阅读更多>>
2017-02-23
