
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > 库卡KUKA机器人 > KUKA库卡机器人KRC4怎么手动运行机器人(二)
KUKA库卡机器人KRC4怎么手动运行机器人(二)
时间:2019-08-10 点击: 来源:互联网 作者:匿名
简介:激活运行模式 操作步骤 1. 打开手动移动选项窗口。 ( 4.13.1 窗口 手动移动选项 页码 46) 2. 激活 运行键 运行模式时: 在选项卡按键中激活复选框激活按键。 激活 空间鼠标 运行模式时: 在选项卡鼠标中激活复选框激活鼠标。 说明:可同时激活 运行键 和 空……
激活运行模式
操作步骤
设定手动倍率(HOV)
操作步骤
1. 打开手动移动选项窗口。
(>>> 4.13.1 " 窗口“ 手动移动选项”" 页码 46)
2. 激活“ 运行键” 运行模式时:
在选项卡按键中激活复选框激活按键。
激活“ 空间鼠标” 运行模式时:
在选项卡鼠标中激活复选框激活鼠标。
说明:可同时激活“ 运行键” 和“ 空间鼠标” 这两种运行模式。 如果用运行键运行机器人,则空间鼠标被锁闭,直到机器人再次静止。 如果操作了空间鼠标,则运行键被锁闭。
设定手动倍率(HOV)
说明:手动调节量是手动运行时机器人的速度。 它以百分比表示,以机器人在手动运行时的最大可能速度为基准。 该值为 250mm/s。
操作步骤:
1. 触摸状态显示 POV/HOV。 关闭窗口 倍率将打开。
2. 设定所希望的手动倍率。 可通过正负键或通过调节器进行设定。
? 正负键: 可以以 100%、75%、50%、30%、10%、3%、1% 步距为单位进行设定
? 调节器: 倍率可以以 1% 步距为单位进行更改。
3. 重新触摸状态显示 POV/HOV。 (或触摸窗口外的区域。)
窗口关闭并应用所需的倍率。
!在窗口 倍率中可通过选项打开窗口手动移动选项。
另一种方法也可使用 KCP 右侧的正负按键来设定倍率。
可以 100%、75%、50%、30%、10%、3%、1% 步距为单位进行设定。
选择刀具和基础系
说明:最多可在机器人控制系统中储存 16 个工具坐标系和 32 个基础坐标系。 使用笛卡尔方法时,必须选择一个工具(工具坐标系)和一个基座(基础坐标系)。
操作步骤:
1. 触摸状态显示工具/ 基坐标。 激活的基坐标/ 工具窗口打开。
2. 选择所需的工具和所需的基坐标。
3. 窗口关闭并应用选项。
用运行键进行与轴有关的移动
前提条件:运行模式“ 运行键” 已激活。
运行方式 T1
操作步骤:
1. 选择轴作为运行键的坐标系。
2. 设定手动倍率。
3. 按住确认开关。
在运行键旁边将显示轴 A1 至 A6。
4. 按下正或负运行键,以使轴朝正方向或反方向运动。
!机器人在运行时的位置可通过如下方法显示: 选择主菜单显示 > 实际位置。
用运行键按笛卡尔坐标移动
前提条件:运行模式“ 运行键” 已激活。
运行方式 T1
工具和基坐标系已选定。
(>>> 4.13.4 " 选择刀具和基础系" 页码 50)
操作步骤:
1. 选择运行键的坐标系统世界、基准或工具。
2. 设定手动倍率。
3. 按住确认开关。
运行键旁边会显示以下名称:
X、Y、Z: 用于沿选定坐标系的轴进行线性运动
A、B、C: 用于沿选定坐标系的轴进行旋转运动
4. 按下正或负运行键,以使机器人朝正或反方向运动。
!机器人在运行时的位置可通过如下方法显示: 选择主菜单显示 > 实际位置。
配置空间鼠标
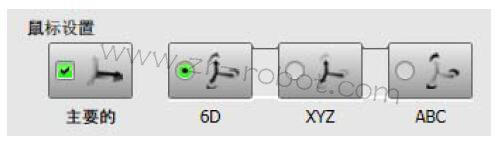
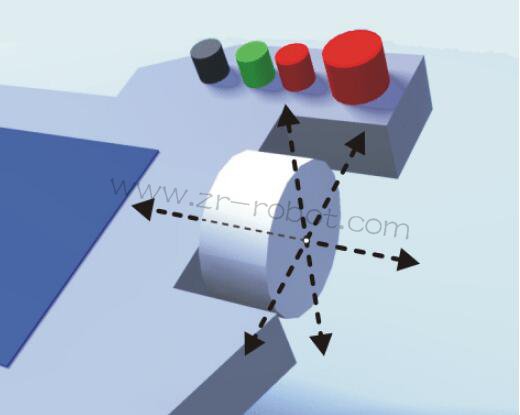
图 4-16: 拉动和按压空间鼠标
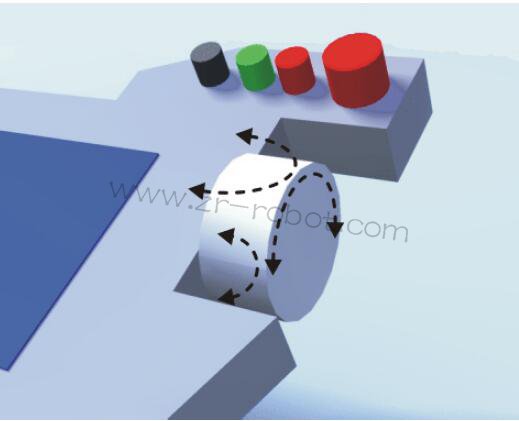
图 4-17: 转动或倾斜空间鼠标

操作步骤:
1. 打开窗口手动移动选项并选择选项卡鼠标。
(>>> 4.13.1 " 窗口“ 手动移动选项”" 页码 46)
2. 组别鼠标设置:
? 复选框主要
按需要接通或关闭主要模式。
? 选项栏6D ; XYZ ; ABC:
选择 TCP 以直线式、旋转式还是两者并用的方式运动。
3. 关闭窗口手动移动选项。
说明:
图 4-15: 鼠标设置
复选框主要
根据主要模式,可以用空间鼠标仅运行一个轴或同时运行几个轴。
| 复选框 | 说明 |
| 激活 |
主要模式已接通。 只运行通过空间鼠标达到最大偏移的
轴。
|
| 未激活 |
主要模式已关闭。 根据轴的选择,可以同时运行 3 或 6
个轴。
|
| 选项 | 说明 |
| 6D |
只能通过拉动、按压、转动或倾斜空间鼠标来移动机器
人。
采用笛卡尔坐标系运行时可以进行下列动作:
沿 X、Y 和 Z 方向平移
围绕 X、Y 和 Z 轴的旋转动作
|
| XYZ |
只能通过拉动或按压空间鼠标来移动机器人。
采用笛卡尔坐标系运行时可以进行下列动作:
沿 X、Y 和 Z 方向平移
|
| ABC |
只能通过转动或倾斜空间鼠标来移动机器人。
采用笛卡尔坐标系运行时可以进行下列动作:
围绕 X、Y 和 Z 轴的旋转动作
|
图 4-16: 拉动和按压空间鼠标
图 4-17: 转动或倾斜空间鼠标
确定空间鼠标定位
说明:
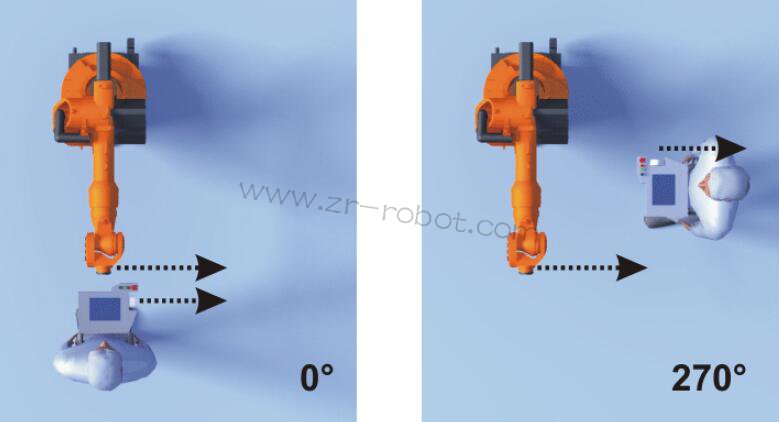
Space Mouse (空间鼠标)可按用户所在地进行调整适配,以使 TCP 的移动方向和 Space Mouse 的偏转动作相适应。
用户所在地则以角度为单位给出。 该角度数据的参照点是机床基座上的接线盒。 机器人或轴的位置不重要。
默认设置: 0°. 这相当于一位使用人员站在接线盒的对面。
图 4-18: 空间鼠标:0° 和 270°
前提条件: 运行方式 T1
操作步骤:
1. 打开窗口手动移动选项并选择选项卡Kcp 项号。
图 4-19: 确定空间
鼠标定位
2. 将 KCP 拉到用户所在地相应的位置上。 (步距刻度 = 45°)
3. 关闭窗口手动移动选项。
!在切换成自动化外部运行方式时,空间鼠标自动定位为 0° 。
用空间鼠标按笛卡尔坐标移动
前提条件:
◇ “ 空间鼠标” 运行方式激活。
◇运行方式 T1
◇工具和基坐标系已选定。
(>>> 4.13.4 " 选择刀具和基础系" 页码 50)
◇空间鼠标已配置。
(>>> 4.13.7 " 配置空间鼠标" 页码 51)
◇空间鼠标已完成校准。
(>>> 4.13.8 " 确定空间鼠标定位" 页码 52)
操作步骤:
1. 选择空间鼠标的坐标系统世界、基坐标系或工具。
2. 设定手动倍率。
3. 按住确认开关。
4. 用空间鼠标将机器人朝所需方向移动。
!机器人在运行时的位置可通过如下方法显示: 选择主菜单显示 > 实际位置。
增量式手动模式
说明:增量式手动运行模式可以使机器人移动所定义的距离,如 10 mm 或 3°。 然后机器人自行停止。
运行时可以用运行键接通增量式手动运行模式。 用空间鼠标运行时不能用增量式手动运行模式。
应用范围:
以同等间距进行点的定位
从一个位置移出所定义距离,如在故障情况下
使用测量表调整
下列选项可供使用:
| 设置 | 说明 |
| 持续的 | 已关闭增量式手动移动。 |
| 100mm / 10° | 1 增量 = 100 mm 或 10° |
| 10mm / 3° | 1 增量 = 10 mm 或 3° |
| 1mm / 1° | 1 增量 = 1 mm 或 1° |
| 0.1mm / 0.005° | 1 增量 = 0.1 mm 或 0.005° |
增量单位为 mm:
适用于在 X 、Y 或 Z 方向的笛卡尔运动。
以度为单位的增量:
适用于在 A、B 或 C 方向的笛卡尔运动。
适用于与轴相关的运动。
前提条件:运行模式“ 运行键” 已激活。
运行方式 T1
操作步骤:
1. 在状态栏中选择增量值。
2. 用运行键运行机器人。 可以采用笛卡尔或与轴相关的模式运行。
如果已达到设定的增量,则机器人停止运行。
如果机器人的运动被中断,如因放开了确认开关,则在下一个动作中被中断的增量不会继续,而会开始一个新的增量。
TAG:
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
