
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > 库卡KUKA机器人 > KUKA机器人与台达PLC进行DeviceNET总线通讯
KUKA机器人与台达PLC进行DeviceNET总线通讯
时间:2019-08-07 点击: 来源:互联网 作者:匿名
简介:步骤: 1、由于我们单位的KUKA焊接机器人DeviceNET模块为主站模块,不可软件更改,固PLC侧只能为从站。首先需用台达DeviceNETBuilder软件将PLC侧DeviceNET扫描模块软件设置为从站, 节点与拨码一致,如5; 2、查看KUKA机器人的IP 地址,将笔记本的IP 地址设……
步骤:
1、由于我们单位的KUKA焊接机器人DeviceNET模块为主站模块,不可软件更改,固PLC侧只能为从站。首先需用台达DeviceNETBuilder软件将PLC侧DeviceNET扫描模块软件设置为从站, 节点与拨码一致,如5;
2、查看KUKA机器人的IP 地址,将笔记本的IP 地址设置为与机器人在同一个网段,打开Workvisual 软件,查找机器人当前项目,激活。
3、查看当前硬件组态是否与实际硬件一致, 一致则可以进行IO 映射。
4、接下来进行机器人侧与PLC侧的IO 映射设置:
第一步:设置主站侧输入、输出字节各8 个字节。
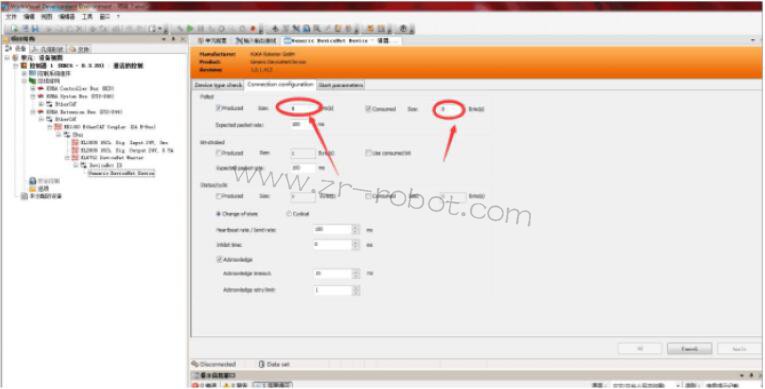
台达DeviceNET模块作为从站时默认输入输出为8 个字节,并非是DeviceNET模块所挂的PLC的实际输入输出点,此处一定注意,否则组态一定出错。
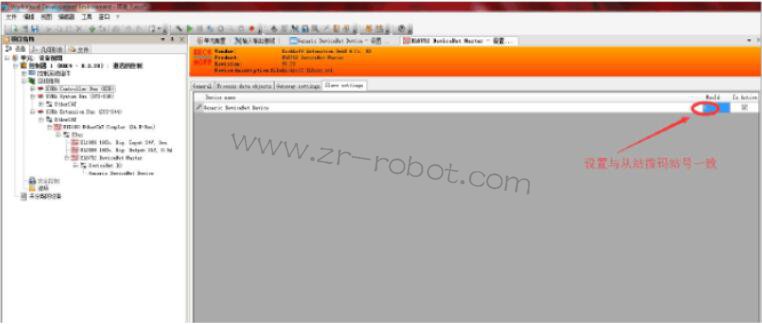
第二步:设置机器人侧主站站号为1
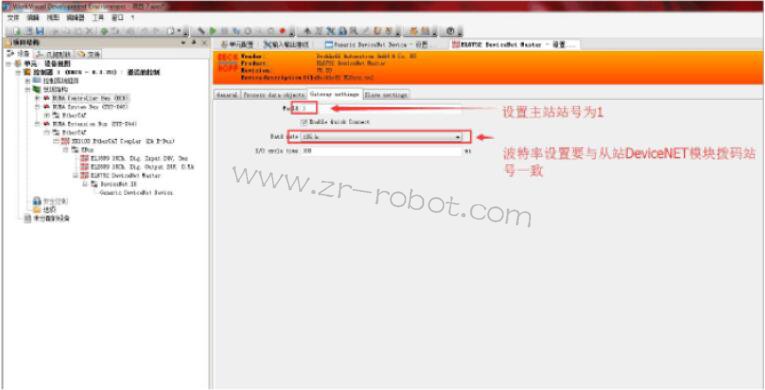
设置从站站号为5
第三步:依次点击画面红色方框部分, 最后点击箭头所指的小圆圈“连接”
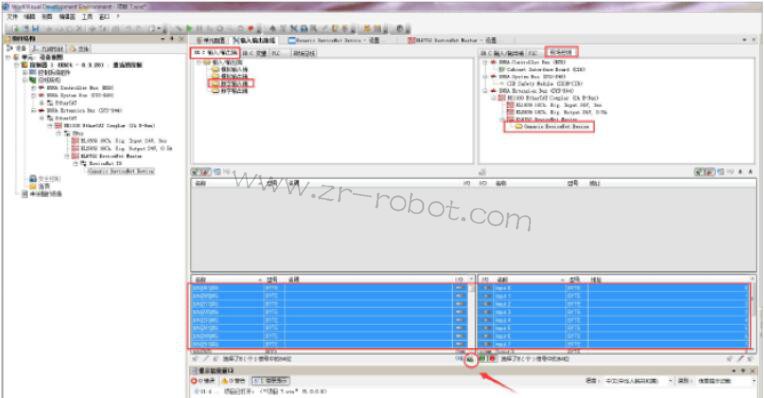
第四步:输入映射完成
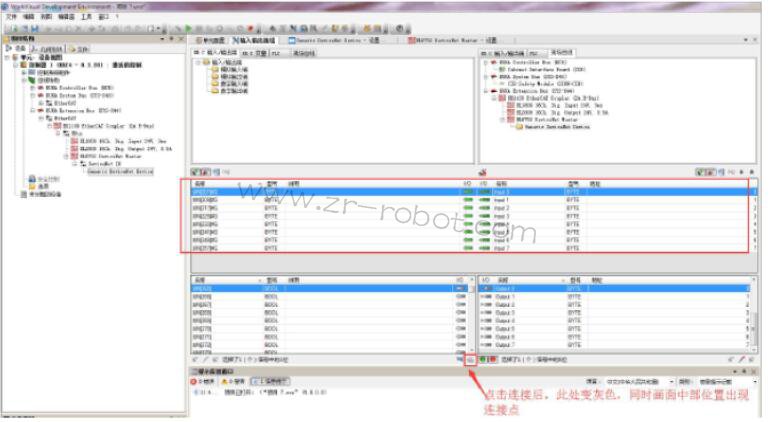
第五步:完成输出映射,如第四步所示,点击KRC输入输出端下面的数字输出端,与第四步相同完成映射。
另外,组态Profibus 与组态DeviceNET,其实映射的操作都是
一样的,不同的是,组态profibus 的输入输出点数有所区别,如下:
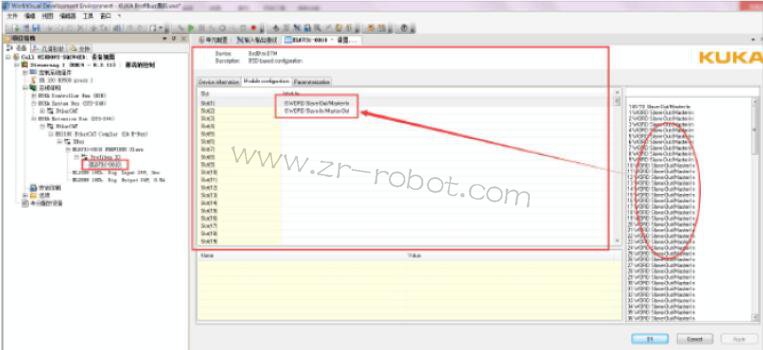
只需要把机器人与PLC进行映射的点数插入红色方框内的槽中即可,接下来的映射组态与DeviceNET一致。
(以上是机器人作为主站, PLC作为从站配置方法;如若需要PLC作为主站,机器人作为从站, 则需要机器人的EDS文件,在PLC侧的DeviceNETBuilder软件内进行组态,具体设置参考台达DeviceNET网络组态手册;另外,如果机器人与台达远程IO 模块进行通讯时, IO 点数不满足8 的整数倍时,必须按组态8 的整数字节,但是实际映射点数必须与远程IO 的实际点数一致)
附件: PLC做主站,机器人做从站

如图具体设置参考台达DeviceNET网络组态手册
TAG:
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
