
- ������������˼�������˾
- �������ߣ�020-82000787(8:30-17:30)
- ��ϵ�ֻ���15889988091(�ǹ���ʱ��)
- ������020-82000787
- ���棺020-32887675
- ���䣺gz@zr-robot.com
- �����з�خ�������ֽ�ɽ�ȴ���˽�1��109
- ��ǰλ�ã���ҳ > ��ҵ������ά�� > FANUC��������ʲô��ԭ��λ�úͿɶ���Χ��
FANUC��������ʲô��ԭ��λ�úͿɶ���Χ��
ʱ��:2017-05-12 ���: ��Դ:������ ����:����
��飺���������ϣ��ֱ�����ԭ��Ϳɶ���Χ�������ᵽ��ɶ���Χ�ļ��ޣ��������̣�OT�������ᶼ�ڿɶ���Χ�����˽��г��̼�⡣ֻҪ���������ŷ�ϵͳ���쳣��ϵͳ����������ԭ��λ�ö�ʧ��FANUC�����˵Ķ��������ᳬ���ɶ���Χ�� ���⣬Ϊ�˽�һ��ȷ����ȫ�����ᡭ��
�������������ϣ��ֱ�����ԭ��Ϳɶ���Χ�������ᵽ��ɶ���Χ�ļ��ޣ��������̣�OT�������ᶼ�ڿɶ���Χ�����˽��г��̼�⡣ֻҪ���������ŷ�ϵͳ���쳣��ϵͳ����������ԭ��λ�ö�ʧ��fanuc�������Ķ��������ᳬ���ɶ���Χ��
�������⣬Ϊ�˽�һ��ȷ����ȫ�����ṩ���û�еʽ�ƶ����Ŀɶ���Χ���ơ�
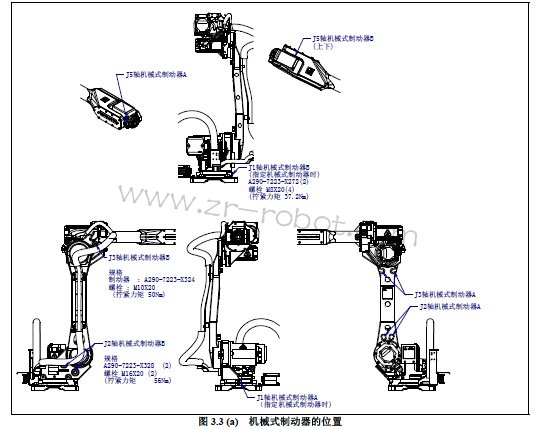
����ͼ 3.3 ��a��ʾ����еʽ�ƶ�����λ�á���ṹ��Ϊ��J1��J3 ��Ļ�еʽ�ƶ�������ʱ��ʹFANUC�����˰�ȫֹͣ�����뽫�Ѿ����ε��ƶ�������Ϊ�µ��ƶ�����������л�еʽ�ƶ����ĸ���ȡ������п��ܵ���FANUC�����˲�������ֹͣ��
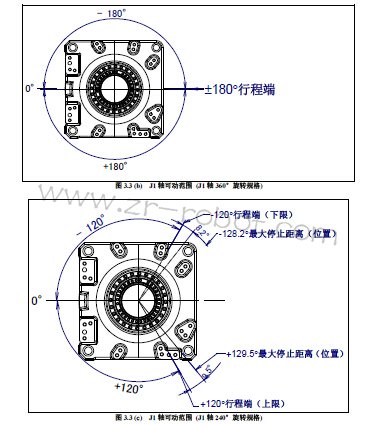
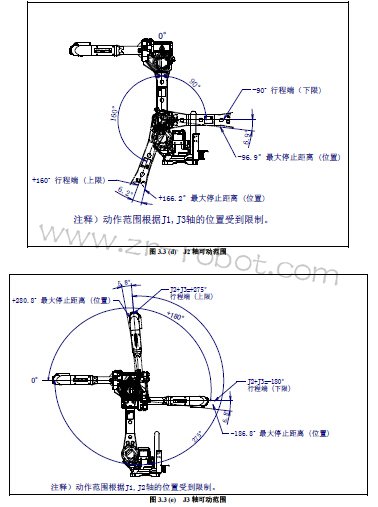
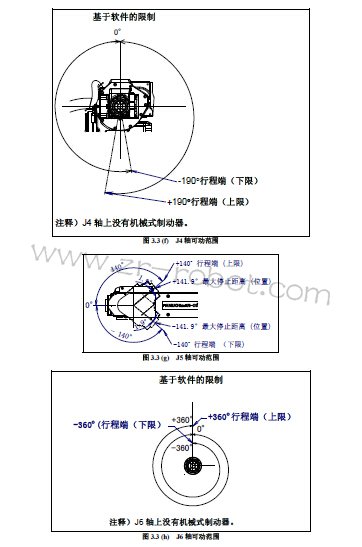
����ͼ 3.3 ��b����3.3 ��h����ʾ�������ԭ�㡢�ɶ���Χ���Լ����ֹͣ���루λ�ã�������ٶȡ������ʱ��ֹͣλ�ã���
�������ɶ���Χ���Ա����������飬����ĵ� 6 ��“����ɶ���Χ”��
����ע��
�������� J1,J2,J3 ����˄ݣ�J1 �ɄӲ����ºͻ������ֱ��п��ܽӴ���ͨ���Ķ�����ʱ�������¡�
�����Ӵ�Ƶ�νϸߵ�ʹ��ʱ���붨�ڼ����¡�
TAG:
FANUC
���������������������º���Ϣ��Դ�ڻ�����������ת�س��ڴ��ݸ�����Ϣ��ѧϰ֮Ŀ�ġ���ת�ظ��漰��Ȩ�����⣬��������ϵ��վ�����ˣ����ǻ����Ը��Ļ�ɾ��������£���֤����Ȩ����
��ҵ������ά������Ķ���
ɨ��ά���ֻ����
