
- ������������˼�������˾
- �������ߣ�020-82000787(8:30-17:30)
- ��ϵ�ֻ���15889988091(�ǹ���ʱ��)
- ������020-82000787
- ���棺020-32887675
- ���䣺gz@zr-robot.com
- �����з�خ�������ֽ�ɽ�ȴ���˽�1��109
- ��ǰλ�ã���ҳ > ��ҵ������ά�� > KUKA������XYZ-4���ⷨ����
KUKA������XYZ-4���ⷨ����
ʱ��:2017-01-18 ���: ��Դ:������ ����:����
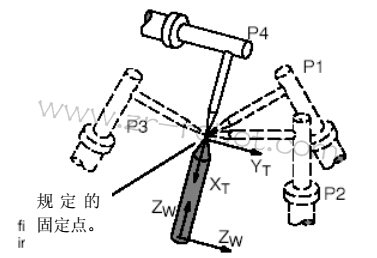
��飺��4-�㷽�������߽��������Ĺ������ĵ��4����ͬ�����ƶ����ο��㡣[��� ��4-�㷽��]�� Ȼ���ڲ�ͬ�ķ���λ�úͽǶȣ���������������ĵ�λ�á� ִ�� KUKA�����˷����ϰ�װ����ߣ��ҳ�һ�����ʵIJο��㡣�������ǹ̶��ڹ����ռ�IJο��Ķ��������ij��������
������“4-��”���������߽��������Ĺ������ĵ��4����ͬ�����ƶ����ο��㡣[��� ��“4-��”����]��

����Ȼ���ڲ�ͬ�ķ���λ�úͽǶȣ���������������ĵ�λ�á�
����ִ��
����KUKA�����������ϰ�װ����ߣ��ҳ�һ�����ʵIJο��㡣�������ǹ̶��ڹ����ռ�IJο��Ķ��������ij��������װ�õ�ij�����˵Ľǡ�
����ʹ�ò˵���”��������”[����ʾ�����ϲ�]���˵�“����”[“У”]��“����”�������ѡ��KUKA�������Ӳ˵�“XYZ-4��”��

���� 4-����Ի����ڴ�
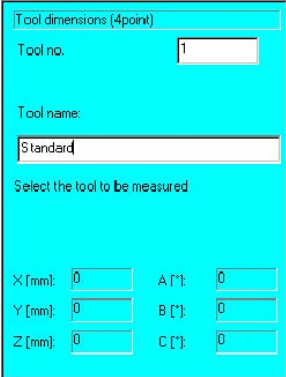
����ʹ��KUKA������״̬��[����ʾ���ײ����ұ�]����+/-��ѡ����Ҫ�Ĺ��ߺš�16����ͬ���ߵ�ȫ���� ���ݴ洢�ڴˡ��ڴ��ڵĵײ���ʾ���ߵ�ǰ�ijߴ��Ƕȡ�

���������ü�ͷ���ӹ��������������룬Ϊ�����������֡�
��������KUKA����������������”[����ʾ���ׅ���]��������Уѡ��Ĺ��ߡ��Զ�����һ������
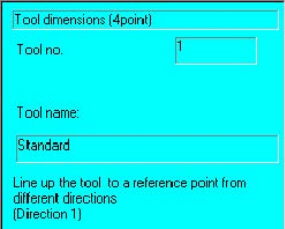
����������ʾ��ʹ���ߴӲ�ͬ�ķ����ij���ο��㡣Ϊ�ˣ�����KUKA���������ƶ�������궼����ʹ�á�
�������ڰ�˳��ִ�����в��衣
����1��������Ҫ�Ĺ���ȡ��
����2���ƶ��������ĵ㵽�ο��㡣
�������ѡ��ĵ�̫�ӽ�������&������Ϣ�������ڿ���������“�أ���”������У������������“�ظ�ȫ��”���ظ�ȫ��У��
�������Ʋ��ֽ����ƶ������ĵ����ʾ������һ������ʻ�����ο��Ĺ�������λ�á��ظ� ��Щ����ֱ�����ĸ������ƶ��ҵ��˲ο��㲢�Ҹ����˲ο������������
����������Ҫ��KUKA�����˹���ȡ��
�����ƶ��������ĵ㵽�ο��㡣
�������������ĵ�λ����ȷ�IJο���ʱ����������“����ȷ”��������λ�á�
TAG:
KUKA
���������������������º���Ϣ��Դ�ڻ�����������ת�س��ڴ��ݸ�����Ϣ��ѧϰ֮Ŀ�ġ���ת�ظ��漰��Ȩ�����⣬��������ϵ��վ�����ˣ����ǻ����Ը��Ļ�ɾ��������£���֤����Ȩ����
��ҵ������ά������Ķ���
ɨ��ά���ֻ����
