
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

如何在工具坐标系中移动喷涂机器人 【图】
关键词:何在,工具,坐标系,移动,喷涂,机器人,工具,坐标系,移动,在工具坐标系中移动喷涂机器人,可以按照以下步骤进行: 选择工具坐标系:首先,需要选择所使用的工具坐标系。这通常是在机器人的控制系统中完成的,可以通过选择相应的工具坐标系编号来实现。 设定手动倍率:为了确保移动过程中的安全和精度,需要设定手动... 阅读更多>>
2023-12-09 -
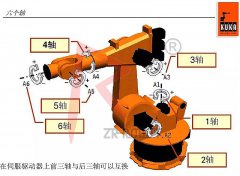
库卡KUKA机器人各坐示系的关系与基本运动编程 【图】
关键词:库卡,KUKA,机器人,各坐,示系,关系,基本,运动,编程,世界坐标系(大地坐标系) *世界坐标系是一个固定定义的笛卡尔坐标系,是用于ROBROOT坐标系和基础坐标系的原点坐标系; *在默认配置中,世界坐标系位于机器人足部。 ROBROOT(关节坐标系) *ROBROOT坐标系是一个笛卡尔坐标系,固定位于机器人足部,它可以根... 阅读更多>>
2019-12-20 -
库卡基本操作问题解决及常用操作技巧 【图】
关键词:库卡,基本操作,问题,解决,常用,操作,技巧,开机,坐标系,1、开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在开机后没有选择工具。解决方案:配置当前工具/基... 阅读更多>>
2019-12-04 -
库卡机器人编程技巧之Frame数据 【图】
关键词:库卡,机器人,编程技巧,Frame,数据,众所周知,KUKA众所周知,KUKA 机器人坐标系的欧拉角表示法 XYZABC,其中XYZ是线性距离,ABC则是旋转角度(即欧拉角)。库卡机器人的笛卡尔变换的顺序是:Z-Y-X,即A-B-C(Rz-Ry-Rx),并且以当前的姿态作为参考。 在库卡编程环境中,经常会碰到一个系统结构体类型数据Frame... 阅读更多>>
2019-12-03 -

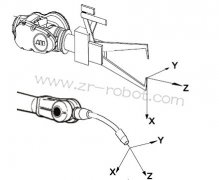
如何在工具坐标系中移动机器人 【图】
关键词:何在,工具,坐标系,移动,机器人,工具,坐标系,手动,移动,在工具坐标系中手动移动 图 2-12: 机器人工具坐标系 在工具坐标系中手动移动时,可根据之前所测工具的坐标方向移动机器人。 因此,坐标系并非固定不变(例如:世界坐标系或基坐标系) ,而是由机器人引导。 在此过程中, 所有需要的机器人轴也会自行移动。哪... 阅读更多>>
2019-09-26 -
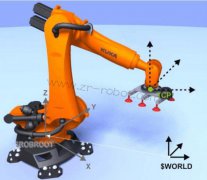
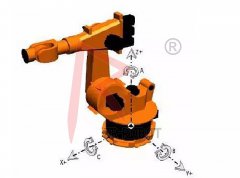
库卡KUKA机器人在世界坐标系中是如何运动 【图】
关键词:库卡,KUKA,机器人,世界,坐标系,如何,运动,库卡,机器库卡机器人在世界坐标系中运动 世界坐标系中的运动 图 2-7: 手动移动世界坐标系的原则 机器人工具可以根据世界坐标系的坐标方向运动。 在此过程中, 所有的机器人轴也会移动。 为此需要使用移动键或者 KUKA smartPAD 的 3D 鼠标。 在标准设置下,世界坐标系... 阅读更多>>
2019-09-26 -
ABB喷涂机器人坐标系及其配置方法 【图】
关键词:喷涂,机器人,坐标系,及其,配置,方法大家对ABB工业机器人的坐标系已经很是了解了。 本文简单介绍一下ABB喷涂机器人的坐标系的介绍及其配置方法。 ABB喷涂机器人坐标系,基本和工业机器人一样。 大地坐标 World Frame: 其他坐标参考的全局基准,是系统中的自定义位置和方向。 输入机器人... 阅读更多>>
2018-12-01 -

工业机器人坐标系介绍 【图】
关键词:工业,机器人,坐标系,介绍工业机器人坐标系介绍 :坐标系:为确定机器人的位置和姿态而在机器人或空间上进行的位置指标系统。 坐标系包含: 基坐标系(BaseCoordinateSystem) 大地坐标系(WorldCoordinateSystem) 工具坐标系(ToolCoordinateSystem) 工件坐标系(WorkObjectCoor... 阅读更多>>
2018-04-10 -

ABB机器人什么是用户坐标系? 【图】
关键词:ABB,机器人,什么,用户,坐标系,用户,坐标系,大地,工件用户坐标系 A 用户坐标系 B 大地坐标系 C 工件坐标系 D 移动用户坐标系 E 工件坐标系,与用户坐标系一同移动 用户坐标系可用于表示固定装置、工作台等设备。机器人驱动器这就在相关坐标系链中提供了一个额外级别,有助于处理持有工件或其它坐标系的处理设备... 阅读更多>>
2017-05-03 -
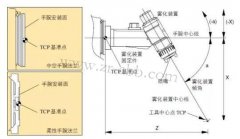
ABB机器人中什么是工具坐标系? 【图】
关键词:ABB,机器,人中,什么,工具,坐标系,工具,坐标系,中心点工具坐标系 工具坐标系将工具中心点设为零位。 它机器人驱动器会由此定义工具的位置和方向。 工具坐标系经常被缩写为 TCPF (Tool Center Point Frame),而工具坐标系中心缩写为 TCPTool Center Point)。 执行程序时,ABB机器人就是将 TCP 移至编程位置。... 阅读更多>>
2017-05-03
