
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-
库卡KUKA机器人视觉抓取的工作原理 【图】
关键词:库卡,KUKA,机器人,视觉,取的,工作,原理,先要,建立,首先要建立机器人的轨迹,作为基础机器人编程轨迹。 视觉抓取主要是通过改变机器人的TOOL坐标系或BASE坐标系来实现的。 物体位置的变化主要是它位置的X,Y,Z方向的变化。 BASE坐标系:可根据需要定义用户坐标系。当机器人配备多个工作台时,选择用户坐标系可使... 阅读更多>>
2020-05-06 -

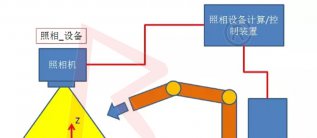
深入了解机器人视觉系统的工作原理和应用 【图】
关键词:深入,了解,机器人,视觉,系统,工作,原理,应用人类要实现一系列基本活动,如生活、工作、学习必须依靠自己的器官,除了大脑外,最重要的是我们的眼睛,(工业) 机器人 也不例外,要完成正常的生产任务,没有一套完美的、先进的视觉系统是很难想象的。 机器视觉系统是用机器代替人眼进行各种测量和判断... 阅读更多>>
2020-06-03 -
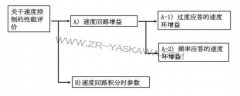
安川机器人伺服驱动器原理 【图】
关键词:安川,机器人,伺服,驱动器,原理安川机器人伺服驱动的定义和构成要素 伺服的定义 正确的伺服构成以及伺服机械原理都是优良自动控制的一部分。目标值的任意变化构成了控制系统。 伺服的构成要素 伺服的构成 编码器的作用 ①检测电气角度(或磁极) 为了使电机均匀地连续旋转,需要检... 阅读更多>>
2019-04-23
- 共1页/3条
