
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-
FANUC发那科机器人位置信息修改详解 【图】
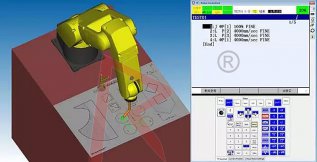
关键词:FANUC,发那科,机器人,位置,信息,修改,详解,修改,位修改位置信息条件如下: 已选定需修改的程序 示教盒处于ON状态 修改位置信息有以下两种方法: 1.示教修改法 2.直接输入法 方法一:示教修改法 1)移动光标到需修正位置的动作指令的行号处; 2)示教机器人到新位置; 3)按【SHIFT】+F5【点修正】即可记录新位置... 阅读更多>>
2020-01-02 -
怎么修改发那科FANUC机器人位置信息 【图】
关键词:怎么,修改,发那科,FANUC,机器人,位置,信息,修改,位修改位置信息条件如下: 已选定需修改的程序 示教盒处于ON状态 修改位置信息有以下两种方法: 1.示教修改法 2.直接输入法 方法一:示教修改法 1)移动光标到需修正位置的动作指令的行号处; 2)示教机器人到新位置; 3)按【SHIFT】+F5【点修正】即可记录新位置... 阅读更多>>
2019-12-14 -
FANUC机器人手腕负载条件 【图】
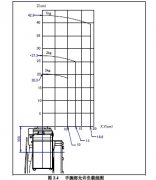
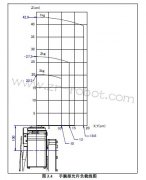
关键词:FANUC,机器人,手腕,负载,条件,3.4,中示,出手,腕图 3.4 中示出手腕部允许负载线图。 1、 负载条件应在图表所示的范围内。 2、 使用时应同时符合手腕允许力矩机器人驱动器、手腕允许惯量的条件。有关手腕允许力矩、手腕允许负载惯量,请参阅规格一览表。 3、 有关向末端执行器的安装,请参阅 4.1 节。 注意... 阅读更多>>
2017-05-13 -

KUKA机器人系统安装附加组件的前提条件 【图】
关键词:KUKA,机器人,系统,安装,附加,组件,前提,条件,KUKKUKA机器人系统安装 KSS 之前, 必须从库卡光盘安装下列组件: 1、 共享存储器驱动 2、网络客户机程序(选项) 3、 文件夹共享(选项) 4、 网卡驱动(选项)... 阅读更多>>
2017-03-30 -
在改变工业机器人动作程序和负载条件后,会产生过热现象 【图】
关键词:改变,工业,机器人,动作,程序,负载,条件,产生,过热,现象现象: 在改变工业机器人动作程序和负载条件后,会产生过热 原因: 可能是因为在超过允许平均电流值的条件下使机器人电机动作。 对策: 1、可通过示教器监控平均电流值。确认运行动作程序时的平均电流值。机器人根据环境温度,规定了不会发生过热的允许平均... 阅读更多>>
2017-05-18 -
KUKA机器人系统安装的前提条件 【图】
关键词:KUKA,机器人,系统,装的,前提,条件,安装,前提,当前,安装前提 安装当前库卡机器人程序前,需要以下几条前提条件: ● 首先,你需要内容含有库卡机器人控制手册的光盘。此光盘包括完整的 WINDOWS 操 作系统和库卡软件。BIOS 设置的操作需要一个外置键盘。 ● 安装操作系统需要一张容量 1.44M 的 3 ?寸软盘 ● 安... 阅读更多>>
2017-03-24 -

FANUC机器人自动运行环境条件及操作步骤 【图】
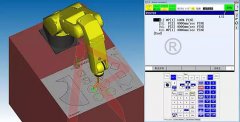
关键词:FANUC,机器人,自动,运行,环境,条件,操作步骤,外部,外部 I/O 用来控制自动执行程序和生产。 1、FANUC机器人需求信号(RSR1-RSR4)选择和开始程序。当一个程序正在执行或中断,被选择的程序处于等待状态,一旦原先的程序停止,就开始运行被选择的程序。 2、程序号码选择信号(PNS1-PNS8 和PNSTROBE)选择一个程... 阅读更多>>
2017-03-26 -
图解如何设备FANUC机器人安装面的负载条件 【图】
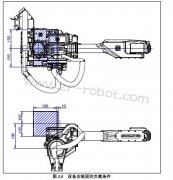
关键词:图解,如何,设备,FANUC,机器人,安装,面的,负载,条件请使 J3 外壳上的设备的重心位置在图3.5 的斜线部。 设备质量的上限:7kg 注意 设备的重心越出斜线部会导致FANUC机器人机构部的早期故障。请注意。... 阅读更多>>
2017-03-09 -
为什么工业机器人规定手腕负载条件? 【图】
关键词:为什么,工业,机器人,规定,手腕,负载,条件,3.4,中示,图 3.4 中示出手腕部允许负载线图。 1.负载条件应在图表所示的范围内。 2.使用时应同时符合手腕允许力矩、手腕允许惯量的条件。有关手腕允许力矩、手腕允许负载惯量,请参阅规格一览 表。 3.有关向末端执行器的安装,请参阅 4.1 节。 注意 超过允许值的使用... 阅读更多>>
2017-03-09 -
KUKA机器人中什么叫开行条件以及其操作步骤 【图】
关键词:KUKA,机器,人中,什么,开行,条件,及其,操作步骤,KUKUKA机器人只在当为其设定的开行条件被满足时才运行。如果不再满足指定的外部条 件,此开行条件也可以使KUKA机器人有控制地停下来。 例如,此功能可用闭锁机器人,但也可以在出现故障时使KUKA机器人停止。 FBONL功能将在移动过程中被检测。所以,它还可以使K... 阅读更多>>
2017-02-28
- 共1页/11条
