
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-
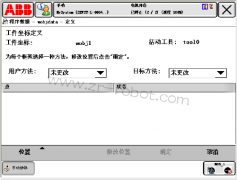
ABB机器人定义用户框架或工件框架或定义二者的方法 【图】
关键词:ABB,机器人,定义,用户,框架,工件,二者,方法,概述,定概述 定义工件意味着ABB机器人将用于指出其所在位置。 共需定义三个位置,两个位于 x 轴上,一个位于 y 轴上。 您定义工件时可以使用用户框架或工件框架,或者两者同时使用。 用户选择框架与 工件框架通常是重合的。 如果不一致,工件框架将偏移于用户框架。... 阅读更多>>
2017-03-27 -
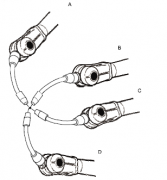
ABB机器人如何执行工具框定义? 【图】
关键词:ABB,机器人,如何,执行,工具,定义,如何,执行,工具,定如何执行工具框定义 本步骤介绍如何在笛卡尔坐标系中定义工具中心点 操作参考信息 1. 将ABB机器人移至合适的位置 A,取得第一个接近点。(使用小幅增量,尽量将工具顶点的位置接近参照点。) 2. 点击修改位置,定义此点。 3. 重复步骤 1 和 2,定义其它的接... 阅读更多>>
2017-03-27 -
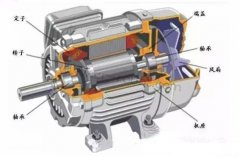
伺服电机(servo motor )在伺服系统的专业术语 【图】
关键词:伺服,电机,servo,motor,伺服系统,专业,术语,定定位或剩余力矩:在没有电流通过绕组时,能使ABB电机的输出轴旋转所需用施加的力矩。 驱动器:一个用来运行伺服电机维修的电气控制装置。这包括电源、逻辑程序器、开关元件以及一个确定伺服速率的变频脉冲源。 动态力矩:在一定伺服速率下电机所产生的力矩。... 阅读更多>>
2016-12-09 -

机器人示教误差补偿方法 【图】
关键词:机器人,示教,误差,补偿,方法,进行,机器人,误差,补偿,定在进行机器人误差补偿及标定时,首先要考虑机器人的精度问题。在示教再现作业方式下,操作者移动机器人末端执行器到指定位置,然后通过机器人控制器记录下此时末端执行器的位姿,通常就是电机的码盘值。然后,机器人可以再现已经记录的运动方式和编程顺序。... 阅读更多>>
2016-11-28
- 共1页/4条
