
- ������������˼�������˾
- �������ߣ�020-82000787(8:30-17:30)
- ��ϵ�ֻ���15889988091(�ǹ���ʱ��)
- ������020-82000787
- ���棺020-32887675
- ���䣺gz@zr-robot.com
- �����з�خ�������ֽ�ɽ�ȴ���˽�1��109
- ��ǰλ�ã���ҳ > ��ҵ������ά�� > ���ӻ�����ά�� > ��ε��Ժ��ӻ����˺�ǹ����ʾ�̸����㣿
��ε��Ժ��ӻ����˺�ǹ����ʾ�̸����㣿
ʱ��:2017-01-16 ���: ��Դ:������ ����:����
��飺��ԭ��Ͳο���֮���������ʾ��2���㡣�ƶ��༭��굽��һ��PTPָ�������LineSel.�����ʺϴ�ԭ���ƶ����ӻ����˽ӽ��ο��㡣�˴�ʾ�����ꡣ��һ���㰴��ͬ�ķ������У���һ��ȷ���ڳ���ִ���ڼ亸�ӻ����˽����� �������ϵ����ϰ�����ײ�����ʹ������Pr����
������ԭ��Ͳο���֮���������ʾ��2���㡣�ƶ��༭��굽��һ��PTPָ�������“LineSel.”�����ʺϴ�ԭ���ƶ����ӻ������ӽ��ο��㡣�˴�ʾ�����ꡣ��һ���㰴��ͬ�ķ������У���һ��ȷ���ڳ���ִ���ڼ亸�ӻ����˽����� �������ϵ����ϰ�����ײ�����ʹ������“Program”-->“Reset program”��λ����

��������“PTP!”����Ҫ���ú��ӻ����˰��ն����·��������ԭ�㵽�ο��㲢���ٴκ��ˡ� ע������·�����κ��ϰ��������Ҫ�Ļ���ʾ������PTP�㡣
������������

����ͨ����“Program start forwards”����������ֱ�������һ�±�������Ȼ���ͷ������������ٴ� ������ֻҪ����У�IJο��㺸�ӻ����˱�ֹͣ��
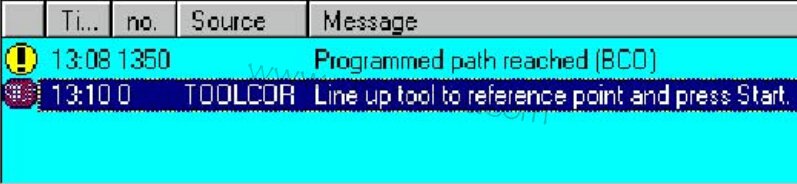
����ȷ����Ϣ���ڵ���Ϣ�����ӻ����˲����ƶ���ʹ���ƶ�����ռ�����ƶ����ӻ�����ֱ�����ӻ����˺�ǹ�������ýӴ� ��������Ϊֹ��

����Ϊ���ú��ӻ����˼�ʱֹͣ���������ƶ����ο��㣬�����ɱ��⺸�ӻ����˺�ǹ�����������

����������ܵĻ����ƶ����ӻ����˺�ǹ���ߵ����ӻ����˺�ǹ����У�ڼ����ĵ㡣���ӻ����˺�ǹ���ߺͲ���������ײ��Σ�ա�
����һ���ƶ����ӻ����˺�ǹ����Զ��Ӵ�������ĵط���ͨ����“Program start forwards”�����¿�ʼ������3�ֲ� ͬ�Ŀ����ԣ�
�������ӻ����˺�ǹ��������δ����
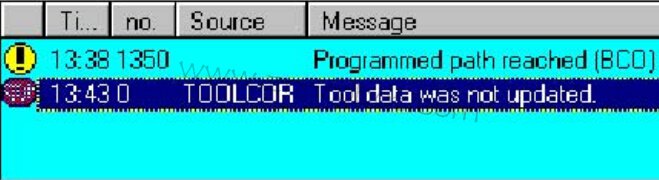
���������Ԥ�Ȳο����ƫ��С�ڱ���“MAX_CRASH”����ģ��Զ����к��ӻ����˺�ǹ���߾�����
�������������£���Ԥ��У�ο����ƫ��С��l/10mm�����û�б�Ҫ������ ���ӻ����˺�ǹ�����������¼������
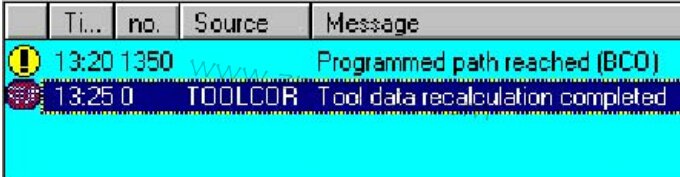
�����������߾�������

���������һ������£�ƫ����ڱ���“MAX_CRASH”�е�ֵ�������ġ������ܽ��о��������ӻ����˵��߱������½���У��
��������Ϣ����ȷ��ֹͣ��Ϣ��ͨ��ȡ��������ɺ��ӻ����˵��߾������̡�
��������б�Ҫ�����ӻ����˵��߱�������У������������������Ҫ����“��”����˵����ָ�� ��ǰλ��“$P��S_ACT”���ο���“REF_PT[x]”��
TAG:
���������������������º���Ϣ��Դ�ڻ�����������ת�س��ڴ��ݸ�����Ϣ��ѧϰ֮Ŀ�ġ���ת�ظ��漰��Ȩ�����⣬��������ϵ��վ�����ˣ����ǻ����Ը��Ļ�ɾ��������£���֤����Ȩ����
��ҵ������ά������Ķ���
ɨ��ά���ֻ����
