
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 机器人保养 > ABB机器人运动过程模式功能介绍
ABB机器人运动过程模式功能介绍
相对于ABB机器人运动过程模式,以下模式 Cycle Time要慢 X %:
Accuracy Mode: 0% - 15%
Low Speed Accuracy Mode: 1% - 30%
Low Speed Stiff Mode: 2% - 100%
机器人品牌: ABB
软件版本: RW 6.0及以上
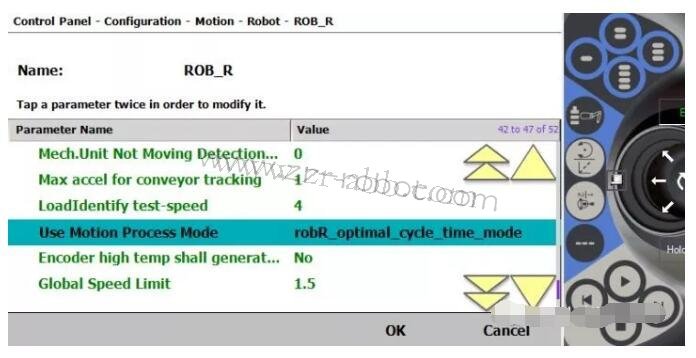
配置参数:MOTION_PROCESS_MODE
参数地址:控制面板-->配置-->Motion-->Robot
限制: 只能用于6轴和7轴的工业机器人。
其中,如果要自定义,机器人维修保养,不是所有的参数都是通用的。
比如,IRB1410 不支持 World Acc Factor。
已定义的ABB机器人运动过程模式:
Optimal cycle time mode:
默认模式。该模式能给予机器人应用最可能短的 Cycle Time;
Accuracy mode
该模式能提高路径精度。
已定义的 Motion Process Mode:
Optimal cycle time mode:
默认模式。该模式能给予机器人应用最可能短的 Cycle Time;
Accuracy mode
该模式能提高路径精度。
但相对于 Optimal Cycle Time Mode, cycle time的时间会有所增长;
一般推荐于在中小型,比如 IRB 1600, IRB 2400等机器人上使用;
Low speed accuracy mode
和 Accuracy Mode 相同的功能;
一般推荐于在大型,KUKA机器人维修,比如 IRB 4600 等机器人上使用;
Low speed stiff mode
推荐使用在类似压装等对刚度要求高的应用中;
也可以用来在一些低速的应用中减少路径的抖动;
该模式的 Cycle Time 会比 Low speed accuracy mode 还要长;
其他模式:
MPM User mode 1 – 4:
Motion Process Mode 内置参数修改:
修改的数据根据实际生产调试的效果来调整。
不同模式中默认的数值“1”代表的默认参数也不一样。
除了手动调整,可以通过RAPID语句来修改参数。
参数的选择有时可能要精确到小数点后两位,所以有时候要花很多时间去找到合适的值。
部分参数说明:
Accset Acc Factor:
用来改变加速度;
如果值为 0.8 ,则意味着 降速 20%;
在 Optimal cycle time mode 中,将其中修改超过 1.0 不会有任何效果;
减少加速度可以减缓抖动和路径错误能问题,但是会延长 Cycle Time。
Dh Factor
通过调整机械单元的有效带宽来改善路径的平滑度;
其值越小,路径越平滑,对于高载荷下的抖动问题成效显著;
Df Factor
Df 可以调整特定轴机械结构的共振频率引;
一般用来补偿因为基座松动或者刚性不足而引发的抖动问题,所以1&2轴用的比较多。
根据经验,机器人维修保养,其值通常在 0.9~1为佳。 最优值通常可以用 ABB 软件 Tune Master 来采集;
Kp Kv Ti Factor
增加 Kp 或者 Kv 皆可以减少路径错误并增加刚度,但是,在有些情况下会加剧路径抖动。
通常来讲,如果需要调整位置或者速度参数,用 Kv 而不是 Kp 或者Ti 来实现;
但如果 Kv 值太大,可能会引发电机噪音。
Joint Acc Factor
Joint Acc Factor 可用来降低特定关节的加速度。
比如,其值为0.6的时候,KUKA机器人培训,表示加速度降低了40%。
它可以被用来降低因特定关节加速度而引起的路径抖动,比如,机器人伺服马达维修,在4~6轴做TCP重定位旋转的时候。
World Acc Factor
当给 World Acc Factor 设定了一个正值(1~100)的时候,就可以动态地去降低全局加速度;
推荐的值为1 (即为默认值);
如果其值为-1, 则代表改功能已被关闭;
该值可以可以减少路径错误,也会稍微增加 Cycle Time。
由于 World Acc Factor 基于路径特性且为动态,所以它相对于 Accset Acc Factor ,反而是一个最有效的(对 Cycle Time 影响最小)改善路径精度的参数。
World Acc Factor 一般推荐于使用在 切割类的应用,因为此类应用对路径的精度要求很高。
该参数不适用于 IRB 340, IRB 360, IRB 540, IRB 1400, IRB 1410。
Geometric Accuracy Factor
Geometric Accuracy Factor 用于调整路径的几何精度;
对于 Accuracy Mode, 推荐值为1。
对于其他模式,如果要改善进度,推荐值为0.1
