

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-

KUKA库卡机器人GA16平衡缸189401异响维修详情
关键词:库卡机器人,GA16,平衡缸,189401,异响,维修KUKA库卡机器人在工业自动化领域中占据重要地位,其GA16平衡缸189401是确保机器人稳定、精确运行的关键部件之一。同时,联系子锐机器人维修做好预防维护工作,降低故障率,提高机器人的运行效率和生产效益。 ... 阅读更多>>
2024-02-21 -

ABB六轴工业机器人IRB6640机械手腕维修评价高
关键词:ABB,六轴工业机器人,IRB6640,机械手腕,维修ABB六轴工业机器人IRB6640机械手腕维修是一项复杂而细致的工作。IRB6640机械手腕作为机器人的末端执行器。同时,联系子锐机器人维修做好预防维护工作,降低故障率,提高ABB机器人的运行效率和生产效益。 ... 阅读更多>>
2024-02-21 -

克鲁斯焊接机器人QRC350焊接电源维修故障类型分析
关键词:克鲁斯,焊接机器人,QRC350,焊接电源,维修,故障,分析克鲁斯CLOOS焊接机器人QRC290以其高效、精准的焊接性能在工业生产中占据重要地位。广州子锐机器人CLOOS克鲁斯机器人常见维修包括:克鲁斯CLOOS机器人QRC350保养维修/伺服电机维修/控制箱维修/驱动器维修/电路板维修等。 ... 阅读更多>>
2024-01-26 -
发那科FANUC焊接机器人M-10iA电机维修指导分析
关键词:发那科FANUC,焊接机器人,M-10iA,电机,维修,指导FANUC发那科伺服电机以其卓越的性能和可靠性赢得了广泛的认可。公司服务品牌均为进口机器人品牌,包括FANUC发那科机器人伺服电机维修,库卡机器人,IGM机器人,ABB机器人,安川机器人,克鲁斯机器人等等欢迎联系广州子锐机器人。 ... 阅读更多>>
2024-01-26 -

安川YASKAWA焊接机器人电路板维修及故障诊断方法
关键词:安川YASKAWA,焊接机器人,电路板,维修,故障,诊断,方在现代工业自动化领域,YASKAWA安川机器人以其高效、精准和稳定的性能赢得了众多企业的青睐。广州子锐机器人YASKAWA安川机器人常见维修包括:YASKAWA安川机器人主板维修;安川YASKAWA电机维修;安川机器人轴减速机维修;安川机械手断路器维修;安川 XRC 轴控 ... 阅读更多>>
2024-01-26 -
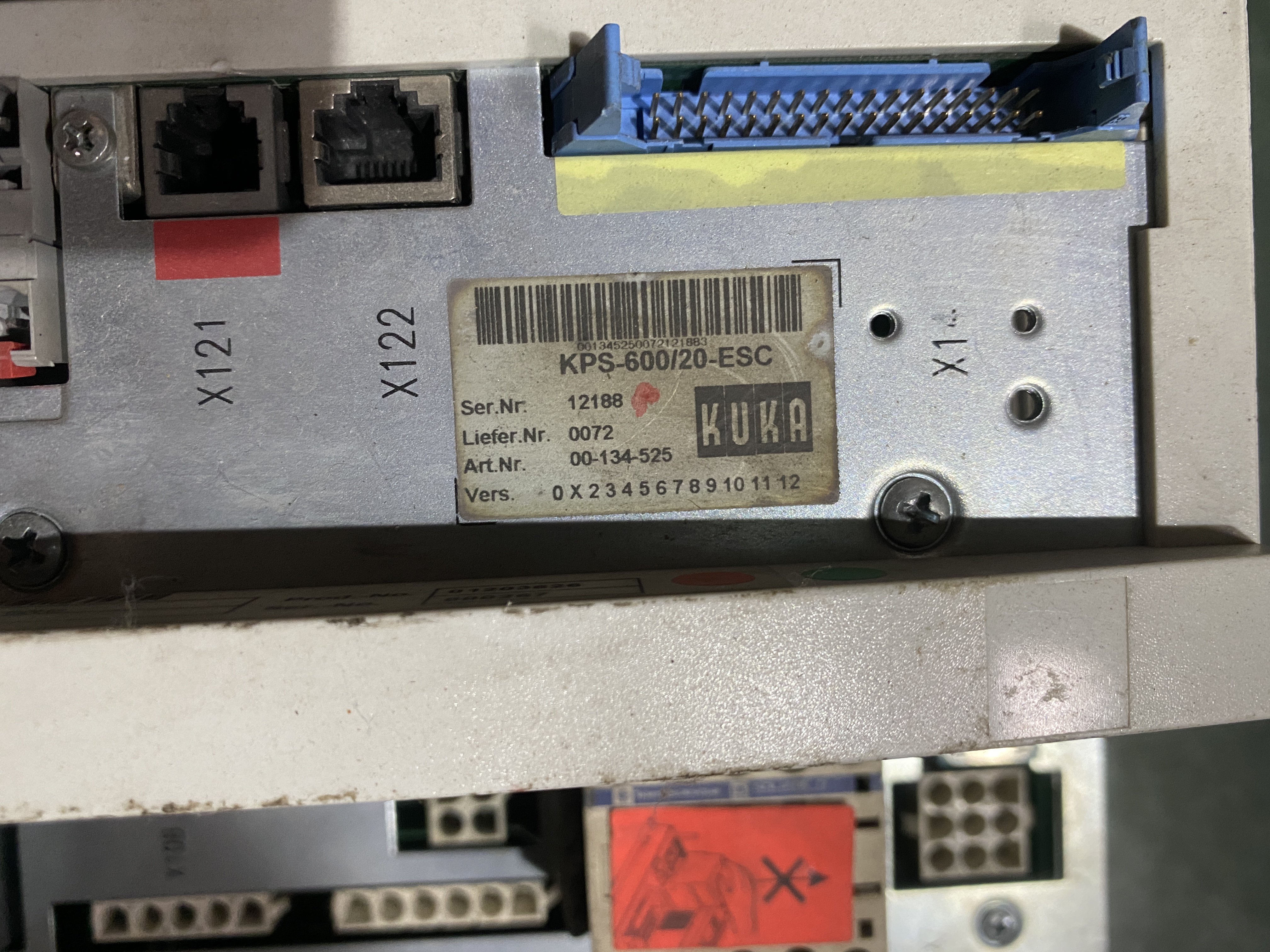
库卡KUKA焊接机器人电源模块维修故障解决方案
关键词:库卡KUKA,焊接机器人,电源模块,维修,故障,解决,方案对于库卡机器人KPS-600/20-ESC电源模块故障诊断和维修十分重要。凭借卓越的技术实力、丰富的行业经验以及广泛的业务网络,子锐机器人已经在国内市场建立了良好的声誉,业务遍布广州、河南、青岛、湖南,湖北,成都等多个地区。 ... 阅读更多>>
2024-01-26 -
FANUC发那科M-10iA焊接机器人控制箱维修技巧
关键词:FANUC发那科,焊接机器人,M-10iA,控制箱,维修,技发那科FANUC机器人在工业自动化领域中占有重要地位,其高效、稳定和精确的性能赢得了众多用户的青睐。广州子锐机器人发那科机器人常见维修包括:FANUC发那科机器人维修保养/齿轮箱维修/伺服电机维修/控制箱维修/示教器维修/驱动器维修等。 ... 阅读更多>>
2024-01-24 -

ABB焊接机器人IRB 2600齿轮箱维修检测步骤
关键词:ABB焊接机器人,IRB 2600,齿轮箱,维修,检测,步骤ABB焊接机器人IRB 2600是工业自动化领域中的佼佼者,其高效、精准的焊接性能广受赞誉。广州子锐机器人ABB机器人常见维修包括:ABB机器人减速机维修/伺服电机维修/控制箱维修/示教器维修/驱动器维修/本体线缆维修/齿轮箱维修。 ... 阅读更多>>
2024-01-24 -

ABB工业机器人控制柜IRC5维修具体细节
关键词:ABB工业机器人,IRC5,控制柜,维修,具体细节广州子锐机器人ABB机器人常见维修包括:ABB工业机器人控制柜IRC5维修/ABB机器人伺服电机维修/ABB机器人控制箱维修/ABB喷涂机器人示教器维修/ABB喷涂机器人驱动器维修/ABB弧焊机器人本体线缆维修 ... 阅读更多>>
2024-01-23 -

KUKA库卡机器人KR16-3主机维修故障原因探究
关键词:库卡KUKA,机器人,主机,维修,故障,原因,KR16-3,广州子锐机器人库卡KUKA机器人常见维修包括:库卡KUKA机器人维修保养/外部轴驱动器维修/库卡KUKA机器人齿轮箱维修/伺服电机维修/KUKA库卡机器人控制箱维修/示教器维修/驱动器维修/库卡KUKA机器人本体线缆维修/减速机维修/电路板维修/库卡KUKA机器人驱动单元维 ... 阅读更多>>
2024-01-23 -

FANUC发那科机器人电源模块维修故障攻略看这里
关键词:FANUC发那科,机器人,电源模块,维修,故障,攻略,看这里广州子锐机器人发那科机器人常见维修包括:FANUC发那科维修保养/齿轮箱维修/伺服电机维修/FANUC发那科喷涂机器人控制箱维修/示教器维修/驱动器维修 ... 阅读更多>>
2024-01-20 -

工业机器人|半导体晶圆搬运机器人维修及检测
关键词:工业机器人,半导体机器人,晶圆搬运机器人,维修,检测广州子锐机器人半导体机器人维修,晶圆搬运机器人维修包括::FANUC发那科 晶圆搬运机器人维修:ABB 子锐机器人半导体机器人维修/Bastian Solutions 晶圆搬运机器人维修/Universal Robots优傲半导体机器人维修/Acieta 晶圆搬运机器人维修/布鲁克斯BROOKS晶圆 ... 阅读更多>>
2024-01-20
