
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > 发那科机器人伺服驱动器维修故障方法
发那科机器人伺服驱动器维修故障方法
时间:2024-10-26 点击: 来源:互联网 作者:匿名
简介:发那科机器人维修驱动器故障描述: “再生放电能量异常大,不能将能量作为热而完全的释放出去。”这是在客户提供的错误代码之后得到的结论。客户错误代码一直无法解除警报。……
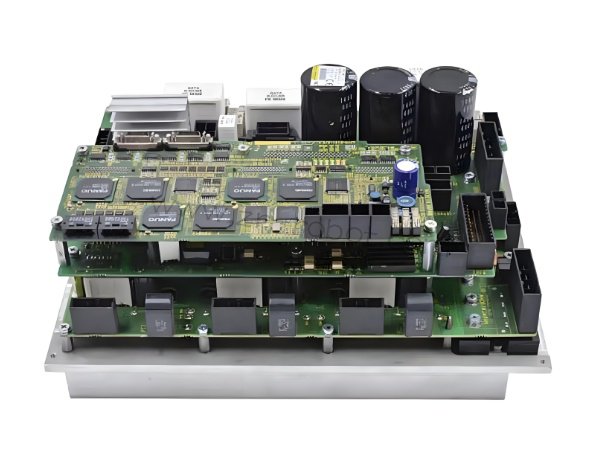
发那科机器人维修驱动器故障描述:
“再生放电能量异常大,不能将能量作为热而完全的释放出去。”
这是在客户提供的错误代码之后得到的结论。客户错误代码一直无法解除警报。
在无法解除这个警报的情况下,我们的工程师推断这是由相关部件的故障所致的。
1、现场状态及报警信息确认
2、备件状态确认
3、关机,拆掉坏的伺服放大器
4、更换新的伺服放大器并测试运行
5、控制柜重新定位
发那科机器人驱动器维修服务过程:
■故障问询
跟FANUC售后人员确认,确实是我们之前更换的伺服放大器故障。
■开机上电,查看报警信息
确认机器人状态,开机上电,确认故障。
■备份
普通备份、镜像备份。
■新备件拆箱
检查新备件情况,拍照记录。
■关机
关机等待10分钟,待电容放电完全,保证操作安全(注意关掉进电总电源)。
■拆卸
先按照从左到右,从上到下的原则拆除快插线头,并随时拍照记录一下,以免后面线号接头错误。
注意:机器人控制柜子内空间较小,注意拆除的线头,拆除固定的螺丝,小心拿出伺服放大器。
■安装
需要人员协助,观察拆除的线头阻碍伺服放大器是安装,安装到位,拧紧固定螺丝,按照拆除快拆线头的基本原则,插上所有快插线头,注意插入到位。
■检查,开机
再次确认接线,检查是否有插错接口和漏插的线头,上电开机,报警复位,伺服上电手动操作 移动机器人。
■自动运行测试
编写一个新的移动程序,自动运行测试30分钟,观察机器人是否有报警。
■生产测试
手动检查生产程序是否OK,然后自动模式直接生产测试正常。
■控制柜重新定位
现场机器人控制柜摆放不合理,存在被叉车碰撞的危险,协助客户摘除控制柜,并重新摆放位置,接线、再测试,直到正常生产。
“再生放电能量异常大,不能将能量作为热而完全的释放出去。”
这是在客户提供的错误代码之后得到的结论。客户错误代码一直无法解除警报。
在无法解除这个警报的情况下,我们的工程师推断这是由相关部件的故障所致的。
1、现场状态及报警信息确认
2、备件状态确认
3、关机,拆掉坏的伺服放大器
4、更换新的伺服放大器并测试运行
5、控制柜重新定位
发那科机器人驱动器维修服务过程:
■故障问询
跟FANUC售后人员确认,确实是我们之前更换的伺服放大器故障。
■开机上电,查看报警信息
确认机器人状态,开机上电,确认故障。
■备份
普通备份、镜像备份。
■新备件拆箱
检查新备件情况,拍照记录。
■关机
关机等待10分钟,待电容放电完全,保证操作安全(注意关掉进电总电源)。
■拆卸
先按照从左到右,从上到下的原则拆除快插线头,并随时拍照记录一下,以免后面线号接头错误。
注意:机器人控制柜子内空间较小,注意拆除的线头,拆除固定的螺丝,小心拿出伺服放大器。
■安装
需要人员协助,观察拆除的线头阻碍伺服放大器是安装,安装到位,拧紧固定螺丝,按照拆除快拆线头的基本原则,插上所有快插线头,注意插入到位。
■检查,开机
再次确认接线,检查是否有插错接口和漏插的线头,上电开机,报警复位,伺服上电手动操作 移动机器人。
■自动运行测试
编写一个新的移动程序,自动运行测试30分钟,观察机器人是否有报警。
■生产测试
手动检查生产程序是否OK,然后自动模式直接生产测试正常。
■控制柜重新定位
现场机器人控制柜摆放不合理,存在被叉车碰撞的危险,协助客户摘除控制柜,并重新摆放位置,接线、再测试,直到正常生产。
TAG:
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
