

- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
-
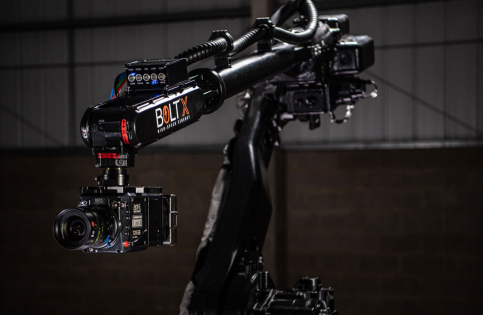
MRMC BOLT X MOCO维修BOLT X控制器电路板维修
关键词:MRMC BOLT X MOCO维修,BOLT X控制器电路MRMC BOLT X MOCO维修,BOLT X控制器电路板维修欢迎联系广州子锐机器人技术有限公司24小时技术服务热线:400-878-2528,手机:13724000724。 ... 阅读更多>>
2022-02-18 -

英国MRMC BOLT维修BOLT MOCO维修BOLT摄影机械臂维修
关键词:MRMC BOLT维修,BOLT MOCO维修,MRMC摄影MRMC BOLT维修常见故障包括:MRMC MOCO开机无显示,MRMC摄影机械臂开机报警、开机无法进系统,关节减速机损坏维修,电机刹车维修、撞机维修、MOCO导轨损坏修,BOLT MOCO齿轮损坏维修、驱动器维修,电路板损坏维修、操作手柄维修,零点丢失校正,控制器维修等。 ... 阅读更多>>
2022-02-18 -

OTC焊机线路板P30099P故障报警维修
关键词:焊机,线路板,P30099P,故障,报警,维修简介:OTC焊机常见异常报警代码及维修方法,OTC焊机线路板P30099P故障报警维修: 异常代码 异常内容 解决对策 E- 000 端子[STOP]之间断开 确认外部连接用端子台TM5[STOP](3-4)是否断开。 解除异常需设置内部功能『 F4』(详情请见6.7.2.4 『 F4 』:自动/半 ... 阅读更多>>
2021-03-27 -

OTC焊机P400线路板P30099P故障维修
关键词:焊机,P400,线路板,P30099P,故障,维修简介:OTC焊机P400常见异常报警代码及维修方法: No. 现象 故障原因 处置 1 电源开关跳闸 请勿再次合闸,请联系代理店 2 开启电源开关,主电源指示灯(PL1)不亮 无一次侧输入电压 确认一次侧电压为AC342418V电压 3 开启电源开关,数字显示表无任何显示 4 打 ... 阅读更多>>
2021-03-26 -

Panasonic松下焊机YD-350GR输出过压维修
关键词:Panasonic,松下,焊机,YD-350GR,出过,维修简介:1.松下焊机YD-350GR输出过压: 输出电缆卷曲 (A)拉直输出电缆。 (B)采用长度合适的电缆。 (C)输出电缆盘绕直径应为大圆环。 当焊枪开关按下时,异常指示灯亮。 (A)P板ZEUPO880上的电阻R1,R2,R5或R6之一短路。 当焊枪开关未按下时,异常指示 ... 阅读更多>>
2021-03-25 -

松下YD-350GR焊机故障报警维修
关键词:松下,YD-350GR,焊机,故障,报警,维修简介:松下焊机维修 ,松下气体保护焊机以其先进的控制技术、良好的焊接性能及高可靠性赢得了广大用户的认可。由于作业环境一般较差,加之使用者的一些不正确的操作,所以电焊机出现一些故障也是在所难免的。松下焊机维修,究其故障产生的原因主要有以下三个 ... 阅读更多>>
2021-03-24 -

克鲁斯CLOOS焊机GLW 450送丝机马达卡死维修
关键词:克鲁斯,CLOOS,焊机,送丝机,马达卡,达卡,维修简介:克鲁斯焊机维修服务,广州子锐机器人技术有限公司专业从事进口机器人维修保养服务,同时针对用在机器人或者大型设备上的机器人焊机进行专业进行克鲁斯焊机维修服务。 送丝机马达卡死或损坏 DSP输出故障 送丝系统故障 温度传感器过温 电路过压 遥控器 ... 阅读更多>>
2021-03-23 -

克鲁斯焊机焊接电弧偏软维修
关键词:克鲁斯,焊机,焊接,电弧,偏软,维修简介:1、用于焊接的焊丝和气体对于低碳钢的多道焊接而言,如果对焊接的材料质量或者焊接的任务没有特殊的要求,药芯焊丝同样适应用于机器人的应用,但通常情况下,不使用这种类型的焊丝。由于实芯焊丝造价最低,并且最高的焊接速度与最高的熔敷率相结合, ... 阅读更多>>
2021-03-22 -

CLOOS克鲁斯焊机GL 500焊接电流过大维修
关键词:CLOOS,克鲁斯,焊机,焊接,电流,过大,维修简介:CLOOS克鲁斯焊机焊接时出现不应有的飞溅: a.检查电极头是否氧化严重。 b.检查焊接工件是否严重锈蚀接触不良。 c.检查调节开关是否档位过高。 d.检查电极压力是否太小,焊接程序是否正确。 CLOOS克鲁斯焊机焊点压痕严重并有挤出物: a.检查电流是否过 ... 阅读更多>>
2021-03-21 -

克鲁斯焊机GLW 35O输入熔丝熔断维修
关键词:克鲁斯,焊机,输入,熔丝,熔断,维修简介:克鲁斯焊机维修: 对于客户而言,其受益之处在于所有的机械手系统部件,从机械手控制、工件、定位器、传感器到电源和焊枪,都是由一家供应商开发和制造的。而诸如熔化极惰性气体/活性气体保护双丝焊接技术、等离子(焊剂)和扁丝焊接等新的有效工艺技 ... 阅读更多>>
2021-03-20 -
克鲁斯焊机送丝机故障维修
关键词:克鲁斯,焊机,送丝机,故障,维修简介:克鲁斯焊机维修 服务,广州子锐机器人技术有限公司专业从事进口机器人维修保养服务,同时针对用在机器人或者大型设备上的机器人焊机进行专业进行克鲁斯焊机维修服务。 送丝机马达卡死或损坏 DSP输出故障 送丝系统故障 温度传感器过温 电路过压 遥控器 ... 阅读更多>>
2021-03-19 -

克鲁斯CLOOS焊机电弧故障维修
关键词:克鲁斯,CLOOS,焊机,电弧,故障,维修简介:传统的MIG焊接 与机器人相结合的主要焊接技术是MAG焊接工艺,全自动和半自动MAG焊接主要采用的是脉冲电弧焊接,这种焊接适用于所有材质,几乎没有任何限制。这些材质是低碳钢和高合金钢、铝合金和钢(镀锌钢板的钎焊)。 脉冲电弧的原理。这种电弧的 ... 阅读更多>>
2021-03-18
