
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > 发那科FANUC机器人 > 发那科机器人三点法TCP校准
发那科机器人三点法TCP校准
时间:2019-12-06 点击: 来源:互联网 作者:匿名
简介:FANUC机器人TCP校准 缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(ToolCenterPoint)。 工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储……
fanuc机器人TCP校准
缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(ToolCenterPoint)。
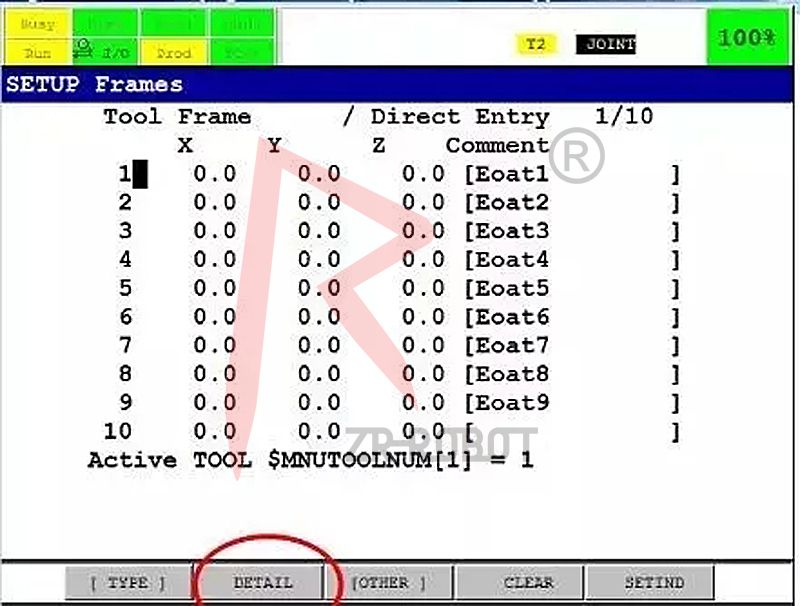
工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储于系统变量$MNUTOOLNUM。
设置方法:三点法,六点法,直接输入法。
现以三点法为例。
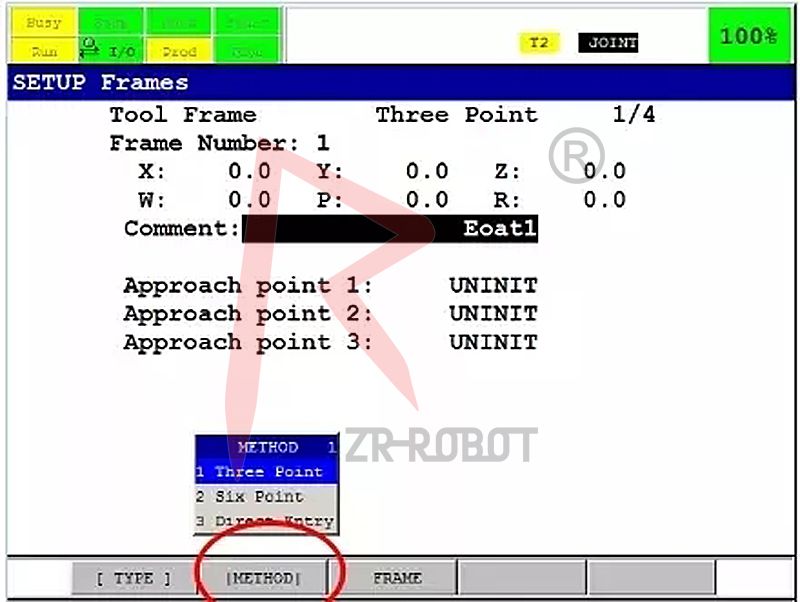
三点法设置方法
DETAIL–METHOD–回车进入三点法界面:
三点法操作步骤:
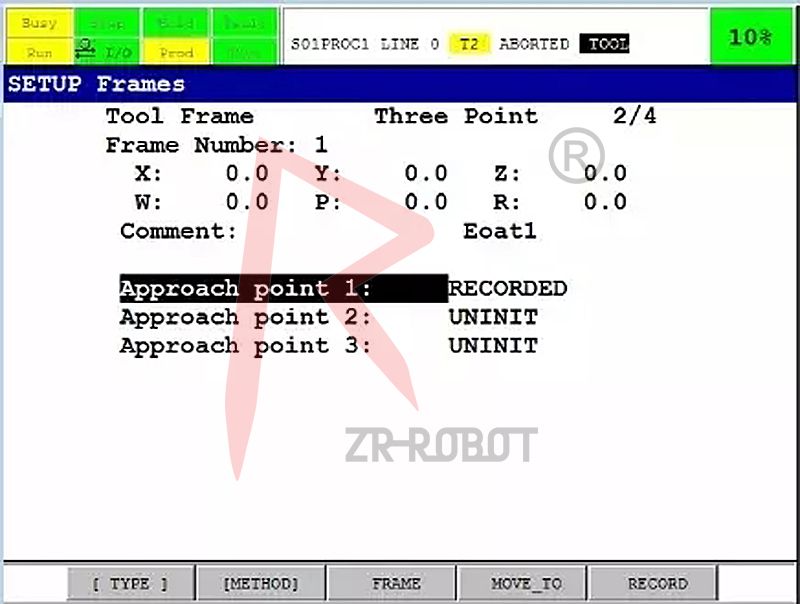
记录接近点1
1、移动光标到接近点1(Approachpoint1);
2、把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
3、按【SHIFT】+F5【RECORD】(位置记录)记录;
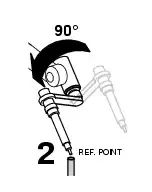
记录接近点2
1、移动光标到接近点2(Approachpoint2);
2、把示教坐标切换成关节坐标(JOINT),旋转J6轴(法兰面)至少90度,不要超过360度;
3、把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
4、按【SHIFT】+F5【RECORD】(位置记录)记录;
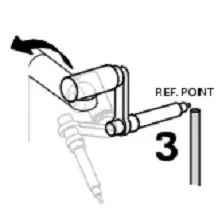
记录接近点3
1、移动光标到接近点3(Approachpoint3);
2、把示教坐标切换成关节坐标(JOINT),旋转J4轴和J5轴,不要超过90度;
3、把示教坐标切换成全局坐标(WORLD)后移动机器人,工具尖端接触到基准点;
4、按【SHIFT】+F5【RECORD】(位置记录)记录;
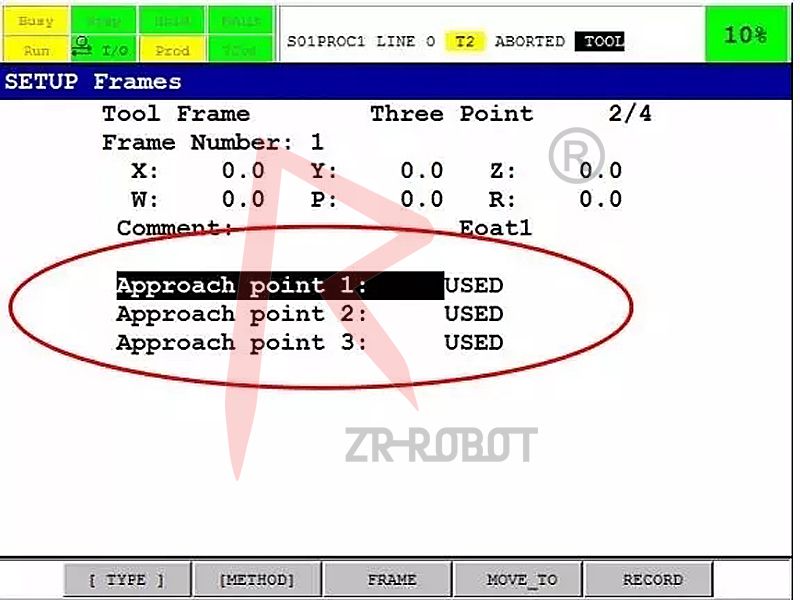
当三个点记录完成,新的工具坐标系被自动计算生成.Point1-3显示成USED,如下图所示:
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
