
- ������������˼�������˾
- �������ߣ�020-82000787(8:30-17:30)
- ��ϵ�ֻ���15889988091(�ǹ���ʱ��)
- ������020-82000787
- ���棺020-32887675
- ���䣺gz@zr-robot.com
- �����з�خ�������ֽ�ɽ�ȴ���˽�1��109
- ��ǰλ�ã���ҳ > ��������Ѷ > �������˸����������ˣ����ѣ�û��ʳ����
�������˸����������ˣ����ѣ�û��ʳ����
�����������ص�������˶����������˿�ѧ�ң��Ӷ��з��������������UrnButt��������������Թܽţ���ɫ�ṹ����ʮ�����Կ��ƶ��̡���Щ�������ɻ��������ڵ���ִ���������ģ����������������ض��ķ���������������ת��
�����ں�����֪��������ʵĹ����У������������м䡣������һ����Ȥ����ϸ��Ժ����Ǹ�����Ӳ���ƶ������Լ�����״�����﹤������ϣ����Ⱥ�ճ�Խš��������ƶ�����ͬʱ�����������ָ������Ȼ���ǿ����ٶȲ��죬�����ǿ��Խ�����ֿ������õĽ���ͷ�϶�����ƺ���һ���ڻ������к��м�ֵ��������
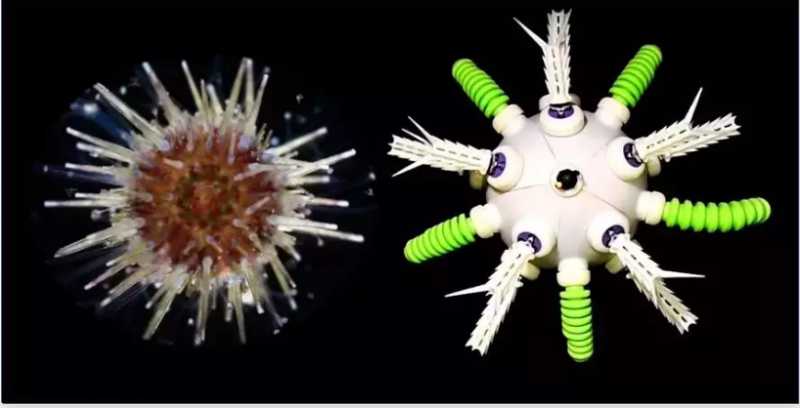
����������IROS 2019�ϣ����Թ����ѧ�Ļ�����ѧ��չʾ��һ�ַ���������UrchinBot�����ֻ�����“�ں��˺������еĽ���ѧ����”����������Һѹ����������ϵ�����ɲ������������ǻ�����ʵ�Ķ������ʹ��ˣ����������˾��������Ǽ����������Ļ�����֮һ��
������ʵ֤�������꺣����һ�ָ��ӵ��������һ�������˰汾�ĺ�����Ҫ�ܶࡣ���꺣����һ���ö�������а�������ͬ�Ļ�����������Ȼ���ǵijߴ�ֻ��0.5���ף����Ŵ�棨����ֱ��230���ף���Ϊ���С�
����������һ���������ı���Ҳ��������Ը������Լ��Ǻ�ճ�Թ��㡣�����ϵ��������Ǿ��˵ģ�������������ѧ�ϵ����ƣ���Ϊ�о���Աǿ����“�����ر�ע�⾫ȷ����������������ݵĽ��������ļ��κ��˶���Χ��”
����UrchinBot�Ĵ̣������Ķ��������������ƶ��������Լ�������϶����ӳ���������꺣�����Ͽ��������ֲ�ͬ�Ĵ̡�û����ȷ��ΪʲôӤ���ļ��ȳ��˸�Ư����������������Ҳ���������ϸ�ڡ�
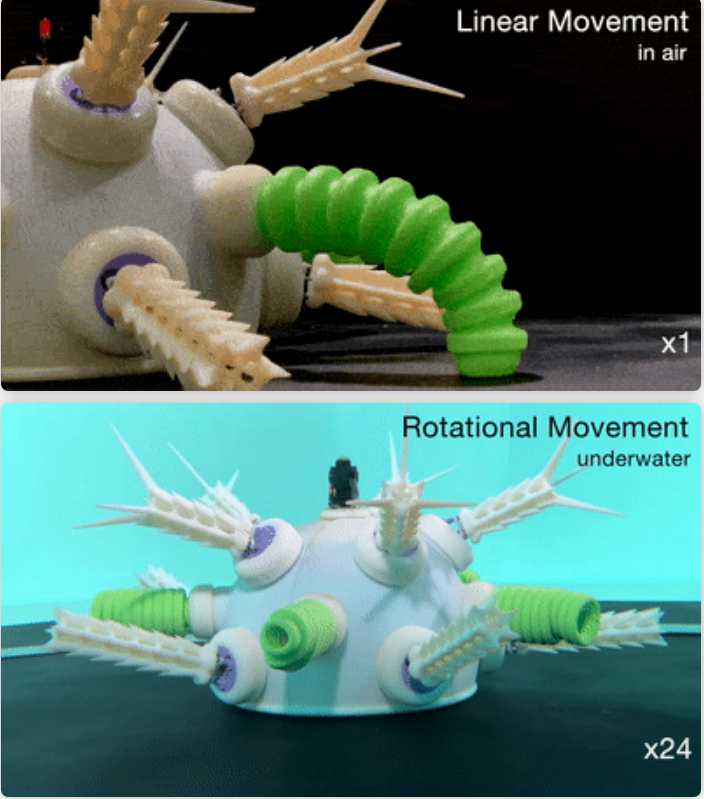
����UrchinBotÿ��������ͨ��һ�����ιؽ��������������ؽ���Χ��һ������������Բ����ɵ������Σ����Գ�������������ͬ�ķ������е�Բ���ڻ������ڲ���������ӵģ�����ζ�ż����ܵ�������������ֻҪ���ƶ�����ͻ�õ���������ĶԳ���ת�˶������������ź������������п��ı�����תʱ�������˻������س��෴�ķ�����ת�ƶ���

�����ܽ�������һ�㣬��Ϊ�����ĺ��������ճ�����ʣ��������Լ�ճ�ڱ����ϣ�Ȼ�����һ��ø�����������ƶ�ʱ������ø���ܽ⽺ˮ��ȡ����֮���ǣ�����������UrchinBotʹ�ÿ������Ľ�ֺ������ֻҪ�����������ʱ������ƶ��������Ϳ����������������ܽų���ʱ�����������ƶ���ʹ���������б�����㹻��ѹ���£���ֺ����������ճ����Ȼ���������˷�ת��Һѹϵͳ�����ܽ������������Լ������ŵ㣬�����´����ٴε�����һ�����������
����������������������ಿ�ֱ��á����ź͵����豸��ռ�ݣ�ʹ����������½�غ�ˮ����ȫ���������ع�����������������á�
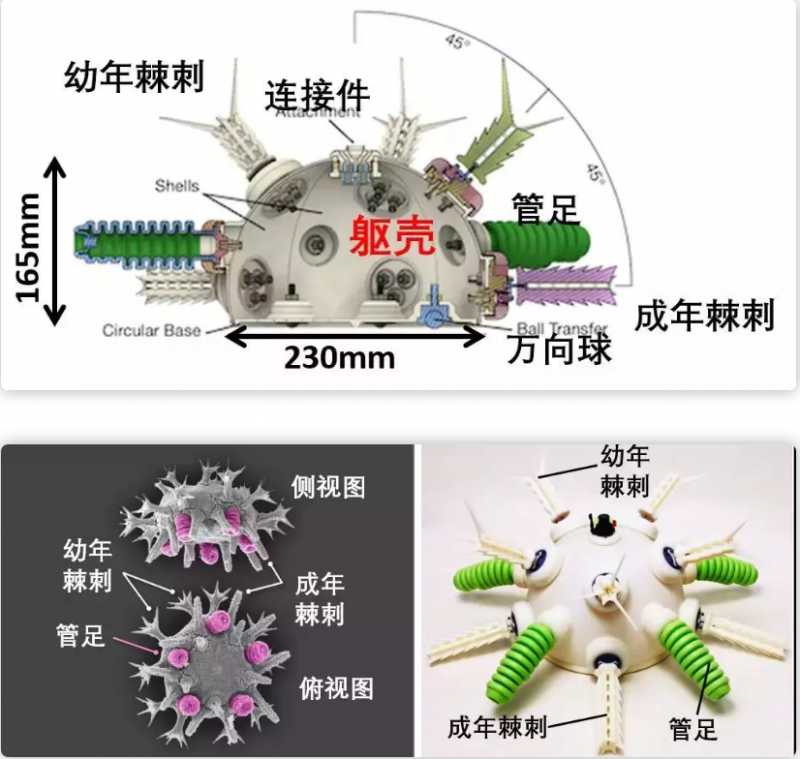
����������֣�UrchinBot�����ļ����ֳ�һ����������ʵ�������˶���Χ����������ġ��ܽſ��Դﵽ6:1�������ʣ�������ͯ������10:1�����൱�ӽ������ȳ��꺣��С�ö࣬���꺣�����Խ��ܽ����쵽50:1�ı��������������˵��ٶȲ��纣��������ԭ���ķ��������Ǵ���������������������ġ�UrchinBot����ٶ�Ϊ6����/�룬��ÿ��0.027�峤�������꺣�����ٶ�Ҫ���öࣨ���꺣�����ٶȿ��Դﵽÿ��10�峤�����ٶ�ֻ�г��꺣����һ�롣

�������������˿��ܲ��Ǻ������Ļ����ˣ����о���Ա˵�������ܶ�ˮ�����ͼ��Ӧ�������ã��ر�����������Ⱦ�Ը���ͳ�Ļ����˹�����ս������¡�������������������Ҫ������Ϊ��װ�Ͼ����ܶ�Ķ���ִ������Ŀ����ʹ�̵�����������ܽŶ�������ɶȡ���Ȼ���������˿����Ҳ������ڵ�Ӧ�ã�����������Ϊһ������̨�������о���Աʶ�����������Ϳ��Ƽ������Ӷ���������ͨ�á�����Ч��ˮ�»����ˡ�
�������ܣ����Թ���˹�о�����Thibaut Paschal��Michael A.Bell��Jakob Sperry��Satchel Sieniewicz��Robert J.Wood��James C.Weaver�ڰ��ž��е�IROS 2019�Ϸ�����һƪ��Ϊ��һ��δ��Լ�������ܺ������������˵���ơ���������������������¡�
