
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 机器人资讯 > 蓄势数载业初就 | 生机电一体化穿戴式机器人科研项目一瞥
蓄势数载业初就 | 生机电一体化穿戴式机器人科研项目一瞥
时间:2020-09-15 点击: 来源:互联网 作者:匿名
简介:随着 机器人 技术的不断发展,机器人种类的增加为人们生活带来不小的便利。由南方科技大学教授付成龙带领的人体增强机器人实验团队,主要从事生机电一体化穿戴式机器人的研究。生机电一体化穿戴式机器人的研发融合了人体生物力学、步态分析、运动康复、机……
随着机器人技术的不断发展,机器人种类的增加为人们生活带来不小的便利。由南方科技大学教授付成龙带领的人体增强机器人实验团队,主要从事生机电一体化穿戴式机器人的研究。生机电一体化穿戴式机器人的研发融合了人体生物力学、步态分析、运动康复、机械工程学、材料学等多门交叉学科知识。
付成龙说:“常见的生机电一体化穿戴式机器人包括机器人动力假肢、负重行走弹性背包机器人和下肢外骨骼机器人等。我们正在研究的机器人动力假肢能够感知假肢和地面之间的作用反力,这种机器人动力假肢能够很好地帮助残障人士恢复运动能力,融入现代生活。”
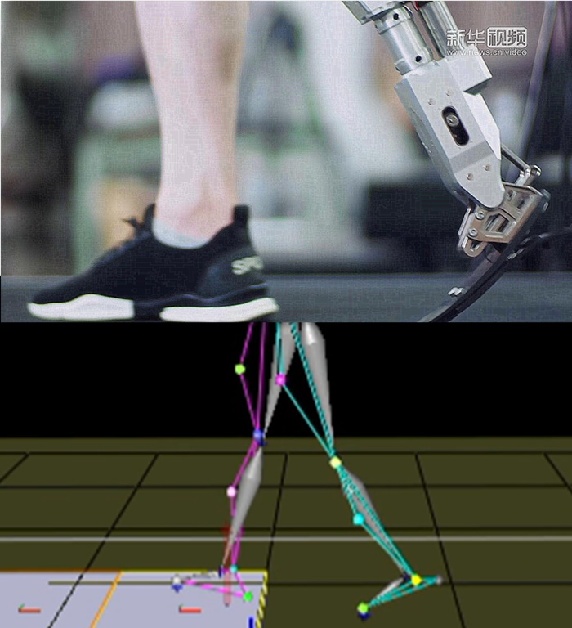
机器人和人体自然运动之间的相容性问题在研究中尤为重要,即主要解决人机运动不协调、步态不自然、行动不灵活等问题。付成龙对此采用了NOKOV(度量)光学三维动作捕捉系统,采集人或其他生物的六自由度(6DoF)的运动轨迹和运动学参数,并将NOKOV(度量)光学三维动作捕捉系统与三维测力平台、表面肌电仪、足底压力测量仪等设备同步运行,进行精确的步态分析。付成龙将采集到的运动学数据作为机器人的运动规划和位姿规划的基础数据,解决了相容性问题。
TAG:
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
