
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 机器人维修服务 > 机器人伺服电机维修 > 川崎机器人维修伺服电机报警E1028故障
川崎机器人维修伺服电机报警E1028故障
时间:2024-11-28 点击: 来源:互联网 作者:匿名
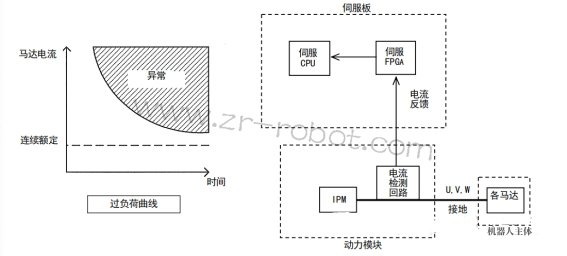
简介:当动力模块反馈的电流强度超出了马达的额定连续电流范围,并且持续时间超过了预设的允许阈值时,系统会触发E1028错误代码。这一判断依据主要来源于伺服组软件对过负荷曲线的实时监测与分析,具体数据展示如下图所示。……
川崎机器人维修E1028故障代码解析:轴XX电机过载问题
故障描述:当动力模块反馈的电流强度超出了马达的额定连续电流范围,并且持续时间超过了预设的允许阈值时,系统会触发E1028错误代码。这一判断依据主要来源于伺服组软件对过负荷曲线的实时监测与分析,具体数据展示如下图所示。
主要原因剖析:
机械层面:
- kasawaki工业机器人手臂与夹具等部件之间可能存在不当接触,导致运动受阻。
- 电缆等连接线材可能被机器人手臂意挂住,影响正常运动。
- 减速器、齿轮、轴承等关键传动部件可能已发生磨损或损坏。
- 齿轮减速部件的齿隙设置不当,可能过小,导致运动阻力增大。
- kasawaki机械手所承受的负荷重量超出了其设计能力范围。
- 机器人的动作模式过于激烈,如急速逆转等,超出了马达的额定承受能力。
- 马达的刹车系统可能未正常释放,导致电机无法顺畅运转。
- 当机器人机身使用气弹簧时,气弹簧的气压可能低于额定值,影响稳定性。
电气层面:
- 马达电源线U相、V相或W相可能出现断路情况,而当前系统未进行断路检查。
- 马达刹车系统可能因故障而未能正常释放。
- 动力模块存在内部故障,影响电流输出。
- 伺服板可能损坏或出现故障,导致信号处理异常。
- 马达自身可能存在故障,如绕组短路、磁体失效等。

川崎机器人维修建议:
- 若机器人手臂与障碍物发生干涉,应立即使用示教模式将其缩回,并检查驱动部件、减速器等是否存在损坏或位置偏差问题。检查手臂是否因变形而导致位置偏差。
- 若川崎机器人维修时发现减速器、齿轮等传动部件已损坏,应及时检查并更换受损零件。
- 若负荷重量或动作模式导致故障,应重新评估机器人的操作条件,并调整至合理范围内。
- 若故障由电气因素引起,应逐一检查伺服放大器部、MC单元、供电单元、马达等部件,并根据需要更换故障元件。(适用于E1x/E2x/E3x/E4x/E9x系列)
- 对于E7x系列,同样需检查伺服放大器部、电源单元、马达等部件,必要时进行更换。
- 检查气弹簧的气压和状态,确保其处于正常工作范围。若气压不足,应及时补充气体或更换气弹簧。
常见的kasawaki机器人故障类型:
- 电源故障:可能表现为电源失效、电压波动异常、电源线连接松动或脱落等问题。
- 传感器故障:可能导致机器人感知能力下降,如测距传感器失灵、力矩传感器数据异常、视觉传感器识别错误等。
- 川崎机器人维修电机驱动故障:可能影响电机的正常运转和稳定性,如驱动电路损坏、电机过热等。
- 编码器故障:编码器作为反馈元件,其故障可能导致位置和运动控制不准确,进而影响机器人的整体性能。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
