
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 机器人维修服务 > 机器人示教器维修 > ABB机器人维修必须遵守的安全守则
ABB机器人维修必须遵守的安全守则
时间:2019-11-14 点击: 来源:互联网 作者:匿名
简介:一、机器人安全操作守则 ABB机器人维修,由于机器人系统复杂而且危险性大,在练习期间,对机器人进行任何操作都必须注意安全。无论什么时候进入机器人工作范围都可能导致严重的伤害,只有经过培训认证的人员才可以进入该区域。 以下的安全守则必须遵……
一、机器人安全操作守则 ABB机器人维修,由于机器人系统复杂而且危险性大,在练习期间,对机器人进行任何操作都必须注意安全。无论什么时候进入机器人工作范围都可能导致严重的伤害,只有经过培训认证的人员才可以进入该区域。 以下的安全守则必须遵守: 万……
一、机器人安全操作守则
ABB机器人维修,由于机器人系统复杂而且危险性大,在练习期间,对机器人进行任何操作都必须注意安全。无论什么时候进入机器人工作范围都可能导致严重的伤害,只有经过培训认证的人员才可以进入该区域。
以下的安全守则必须遵守:
万一发生火灾,请使用二氧化碳灭火器。
急停开关(E-Stop)不允许被短接。
机器人处于自动模式时,任何人员都不允许进入其运动所及的区域。
在任何情况下,不要使用机器人原始启动盘,用复制盘。
机器人停机时,夹具上不应置物,必须空机。
机器人在发生意外或运行不正常等情况下,均可使用E-Stop键,停止运行。
因为机器人在自动状态下,即使运行速度非常低,其动量仍很大,所以在进行编程、测试及维修等工作时,必须将机器人置于手动模式。
气路系统中的压力可达0.6MP,任何相关检修都要切断气源。
在手动模式下调试机器人,如果不需要移动机器人时,必须及时释放使能器(EnableDevice)。
调试人员进入机器人工作区域时,必须随身携带示教器,以防他人误操作。
在得到停电通知时,要预先关断机器人的主电源及气源。
突然停电后,要赶在来电之前预先关闭机器人的主电源开关,并及时取下夹具上的工件。
机器人维修,维修人员必须保管好机器人钥匙,严禁非授权人员在手动模式下进入机器人软件系统,随意翻阅或修改程序及参数。
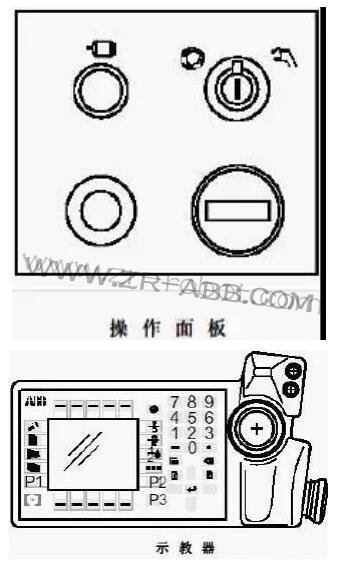
二、机器人操作面板功能:
1、机器人示教单元
2、马达上电按钮(带显示灯):
显示灯常亮,机器人已上电,待命状态。
显示灯闪烁(1Hz),机器人未上电。
显示灯急促闪烁(4Hz),机器人未同步。
3、机器人急停按钮:
4、操作模式选择器(带钥匙):
(1)自动模式:用于正式生产,编辑程序功能被锁定。
(2)限速模式:<250mm/s用于机器人编程测试。
(3)手动全速模式:只允许专业人员在测试程序时使用。一般情况下,避免使用这种运动模式。(选配项)
5、机器人运行时间计时器:
显示机械手马达上电,刹车释放的总时间。为机器人维修与保养提供数据。
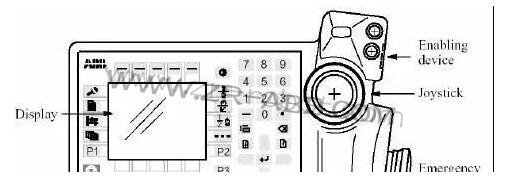
三、示教器功能:
1、功能显示
Emergencystopbutton(E-Stop):急停开关。
Enablingdevice:使能器。
Joystick:操纵杆。
Display:显示屏。
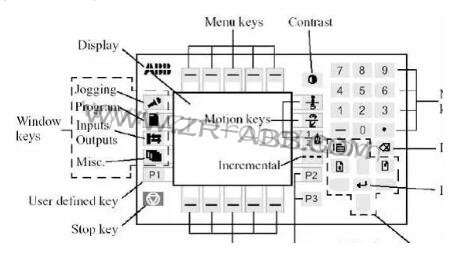
2、窗口键:(Windowkeys)
Jogging -操纵窗口手动状态下,用来操纵机器人。显示屏上显示机器人相对位置及当前座标系。
rogram-编程窗口手动状态下,用来编程与测试。所有编程工作都在编程窗口中完成。
Input/Outputs-输入/输出窗口显示输入输出信号表与其数值。可手动给输出信号赋值。
Misc.-其他窗口:包括系统参数、服务、生产以及文件管理窗口。
3、导航键:(Navigationkeys)
List -切换键将光标在窗口的几个部分间切换。(通常由双实线分隔)
extPage-向下翻页键将光标向下快速移动。
reviousPage-向上翻页键将光标向上快速移动。
Uparrows-光标上移键将光标向上单步移动。
Downarrows-光标下移键将光标向下单步移动。
Leftarrows-光标左移键将光标向左单步移动。
Rightarrows-光标右移键将光标向左单步移动。
4、运动控制键:(Motionkeys)
MotionUnit-运动单元切换键手动状态下,操纵机器人本体与机器所控制的其他机械装置(外轴)之间的切换。
MotionType1-运动模式切换键1直线运动与姿态运动切换键。
直线运动是指机器人TCP沿座标系X、Y、Z轴方向作直线运动。
姿态运动是指机器人TCP在座标系中X、Y、Z轴数值不变,只沿着X、Y、Z轴旋转,改变姿态。
MotionType2-运动模式切换键2单轴运动选择键。
第一组:1、2、3轴
第二组:4、5、6轴
Incremental-点动操纵键
启动或关闭点动操纵功能,从而控制机器人手动运行时速度。
5、其他键:(Otherkeys)
top-停止键停止机器人程序运行。
Contrast-光亮键调节显示器对比度。
MenuKeys-菜单键显示下拉式菜单(热键),共有五个菜单键,显示包含各种命令的菜单。
Functionkeys-功能键直接选择功能(热键),共有五个功能键,直接选择各种命令。
Delete-删除键删除显示屏所选数据,机器人操作时,所要删除任何数据、文件、目录等,都用此键。
Enter-回车键进入光标所示数据。
6、自定义键:(Programmablekeys)
P1-P5这五个自定义键的功能可由程序员自定义,每个键可以控制一个模拟输入信号或一个输出信号以及其端口。
四、手动操作机器人:
1、操纵窗口切换:
将机器人操作模式选择器置于手动限速模式。
切换至操纵窗口。
2运动控制键:
(1)运动单元切换键:
ExternalUnit-外轴运动单元Robot-机器人
光标指向机器人,操纵杆操纵机器人本体运动。
光标指向外轴,操纵杆操纵外轴,一台机器人最多可控制六个外轴。
(2)运动模式切换键:
Linear-直线运动
机器人工具姿态不变,机器人TCP沿座标轴线性移动。
选择不同坐标系,机器人移动方向将改变。
Reorientation-姿态运动
机器人TCP位置不变,机器人工具沿座标轴转动,改变姿态。
Axes-单轴运动
Axes1,2,3-第一、二、三轴
3座标系设定:
(1)座标系种类:
一、机器人安全操作守则
ABB机器人维修,由于机器人系统复杂而且危险性大,在练习期间,对机器人进行任何操作都必须注意安全。无论什么时候进入机器人工作范围都可能导致严重的伤害,只有经过培训认证的人员才可以进入该区域。

以下的安全守则必须遵守:
万一发生火灾,请使用二氧化碳灭火器。
急停开关(E-Stop)不允许被短接。
机器人处于自动模式时,任何人员都不允许进入其运动所及的区域。
在任何情况下,不要使用机器人原始启动盘,用复制盘。
机器人停机时,夹具上不应置物,必须空机。
机器人在发生意外或运行不正常等情况下,均可使用E-Stop键,停止运行。
因为机器人在自动状态下,即使运行速度非常低,其动量仍很大,所以在进行编程、测试及维修等工作时,必须将机器人置于手动模式。
气路系统中的压力可达0.6MP,任何相关检修都要切断气源。
在手动模式下调试机器人,如果不需要移动机器人时,必须及时释放使能器(EnableDevice)。
调试人员进入机器人工作区域时,必须随身携带示教器,以防他人误操作。
在得到停电通知时,要预先关断机器人的主电源及气源。
突然停电后,要赶在来电之前预先关闭机器人的主电源开关,并及时取下夹具上的工件。
机器人维修,维修人员必须保管好机器人钥匙,严禁非授权人员在手动模式下进入机器人软件系统,随意翻阅或修改程序及参数。
二、机器人操作面板功能:
1、机器人示教单元
2、马达上电按钮(带显示灯):
显示灯常亮,机器人已上电,待命状态。
显示灯闪烁(1Hz),机器人未上电。
显示灯急促闪烁(4Hz),机器人未同步。
3、机器人急停按钮:
4、操作模式选择器(带钥匙):
(1)自动模式:用于正式生产,编辑程序功能被锁定。
(2)限速模式:<250mm/s用于机器人编程测试。
(3)手动全速模式:只允许专业人员在测试程序时使用。一般情况下,避免使用这种运动模式。(选配项)
5、机器人运行时间计时器:
显示机械手马达上电,刹车释放的总时间。为机器人维修与保养提供数据。
三、示教器功能:
1、功能显示
Emergencystopbutton(E-Stop):急停开关。
Enablingdevice:使能器。
Joystick:操纵杆。
Display:显示屏。
2、窗口键:(Windowkeys)
Jogging -操纵窗口手动状态下,用来操纵机器人。显示屏上显示机器人相对位置及当前座标系。
rogram-编程窗口手动状态下,用来编程与测试。所有编程工作都在编程窗口中完成。
Input/Outputs-输入/输出窗口显示输入输出信号表与其数值。可手动给输出信号赋值。
Misc.-其他窗口:包括系统参数、服务、生产以及文件管理窗口。
3、导航键:(Navigationkeys)
List -切换键将光标在窗口的几个部分间切换。(通常由双实线分隔)
extPage-向下翻页键将光标向下快速移动。
reviousPage-向上翻页键将光标向上快速移动。
Uparrows-光标上移键将光标向上单步移动。
Downarrows-光标下移键将光标向下单步移动。
Leftarrows-光标左移键将光标向左单步移动。
Rightarrows-光标右移键将光标向左单步移动。
4、运动控制键:(Motionkeys)
MotionUnit-运动单元切换键手动状态下,操纵机器人本体与机器所控制的其他机械装置(外轴)之间的切换。
MotionType1-运动模式切换键1直线运动与姿态运动切换键。
直线运动是指机器人TCP沿座标系X、Y、Z轴方向作直线运动。
姿态运动是指机器人TCP在座标系中X、Y、Z轴数值不变,只沿着X、Y、Z轴旋转,改变姿态。
MotionType2-运动模式切换键2单轴运动选择键。
第一组:1、2、3轴
第二组:4、5、6轴
Incremental-点动操纵键
启动或关闭点动操纵功能,从而控制机器人手动运行时速度。
5、其他键:(Otherkeys)
top-停止键停止机器人程序运行。
Contrast-光亮键调节显示器对比度。
MenuKeys-菜单键显示下拉式菜单(热键),共有五个菜单键,显示包含各种命令的菜单。
Functionkeys-功能键直接选择功能(热键),共有五个功能键,直接选择各种命令。
Delete-删除键删除显示屏所选数据,机器人操作时,所要删除任何数据、文件、目录等,都用此键。
Enter-回车键进入光标所示数据。
6、自定义键:(Programmablekeys)
P1-P5这五个自定义键的功能可由程序员自定义,每个键可以控制一个模拟输入信号或一个输出信号以及其端口。
四、手动操作机器人:
1、操纵窗口切换:
将机器人操作模式选择器置于手动限速模式。
切换至操纵窗口。
2运动控制键:
(1)运动单元切换键:
ExternalUnit-外轴运动单元Robot-机器人
光标指向机器人,操纵杆操纵机器人本体运动。
光标指向外轴,操纵杆操纵外轴,一台机器人最多可控制六个外轴。
(2)运动模式切换键:
Linear-直线运动
机器人工具姿态不变,机器人TCP沿座标轴线性移动。
选择不同坐标系,机器人移动方向将改变。
Reorientation-姿态运动
机器人TCP位置不变,机器人工具沿座标轴转动,改变姿态。
Axes-单轴运动
Axes1,2,3-第一、二、三轴
3座标系设定:
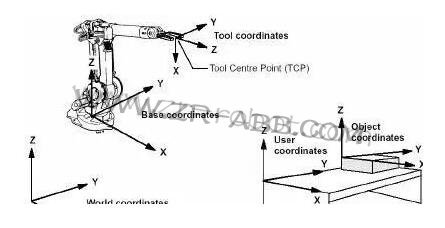
(1)座标系种类:
Worldcoordinates 大地座标系
Basecoordinates 基础座标系
Toolcoordinates 工具座标系
TAG:
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
